Download
1 / 18
180 likes | 196 Views
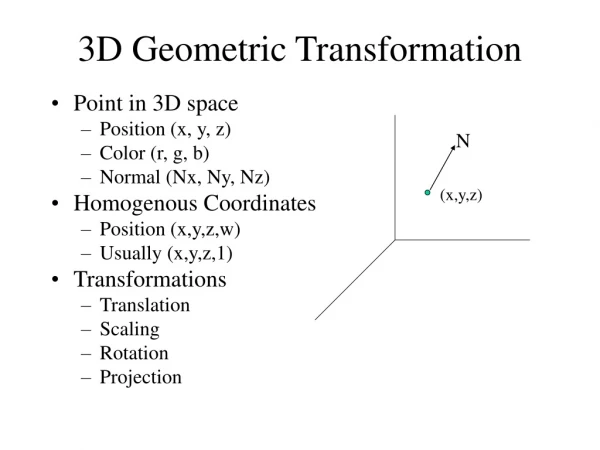
This guide provides a detailed overview of the 3D Transformation Pipeline, focusing on Modeling Coordinates, World Coordinates, Viewing Transformation, Projection Coordinates, and Workstation Transformation. Learn how to select a specific view for a scene by establishing a viewing coordinate system, setting up a projection plane perpendicular to the Zv axis, and transforming world coordinate positions to viewing coordinates. Discover the right-handed viewing coordinate system, transforming world coordinate positions to viewing coordinates, and key viewing procedures. Explore how to map from world to viewing coordinates, adjust the viewing reference point, and simulate camera motion through a scene. Gain insights into transformation sequences, rotations, and important viewing parameters such as eye position, view direction, up direction, aperture, and film plane in the canonical coordinate system.

E N D
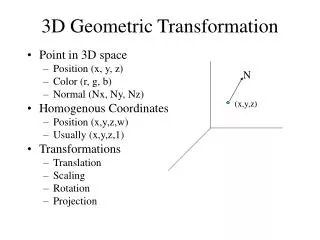
3D Transformation Pipeline Modeling Coordinates Modeling Transformation World Coordinates Viewing Transformation Viewing Coordinates Projection Transformation Projection Coordinates Workstation Transformation Device Coordinates
Viewing Coordinates To choose a particular view for a scene: • Establish a viewing coordinate system • Setup a view plane or projection plane perpendicular to the Zᵥ axis • Transform the world coordinate positions in the scene to viewing coordinates • Project viewing coordinates on to the view plane.
Right handed viewing coordinate system is used • View reference point is the origin of the ‘VCS’ Viewing Coordinate System • World Coordinate Positions are to be transformed to viewing coordinates
Viewing System or ‘uvn’ System • Select the positive direction for the viewing Zᵥ axis • Select the orientation of the viewplane by specifying view plane normal N (relative to either WCS as is commonly done, or to ‘vcs’) • Next specify up direction for the view using the view-up vector V. This vector sets positive direction of the Yᵥ axis. • Direction of V must not be parallel to N when selected.
Viewing System or ‘uvn’ System • Viewing procedures typically adjust the user defined orientation of vector V so that V is projected on the plane perpendicular to N. • Using V and N graphics package can compute U perpendicular to both N & V. • The viewing system is often described as ‘uvn’ system.
Step: 2 Step: 1
Step: 3 Step: 4
Observations: • Generally graphics packages allow users to select viewing plane along Zᵥ axis by specifying viewing plane distance from viewing origin • View plane is always parallel to Xᵥ Yᵥ plane • Projection of objects onto view plane constitutes the scene • Right handed viewing systems are common as WCS is also right handed, therefore orientation remains same
Observations: • To get series of views of a scene, keep view reference point same and change direction of N • Thus we can view scene from any direction except along the line of V • To simulate camera motion through a scene, keep N fixed and move the view reference point around.
VIEWING TRANSFORMATION • Mapping from world to Viewing coordinates • Origin moves to eye position • Up vector maps to Y axis • Right vector maps to X axis
Transformation from WC to VC General sequence of translate-rotate transformation • Transformation sequences • 1. Translate the view reference point to the origin of the WC system • 2. Apply rotations to align the xv, yv, and zv axes with
Transformation from WC to VC • Translation • view reference point(x0, y0, z0) • Rotation • rotate around the world xw axis to bring zv into the xwzw plane • rotate around the world yw axis to align the zw and zv axis • final rotation is about the zw axis to align the yw and yv axis
Transformation from WC to VC • Rotation by uvn system • Calculate unit uvn vectors • N : view-plane normal vector • V : view-up vector • U : perpendicular to both N and V • Form the composite rotation matrix
Viewing Parameters • Position • Eye position(px, py, pz) • Orientation • View direction(dx, dy, dz) • Up direction(ux, uy, uz) • Aperture • Field of view(xfov, yfov) • Film plane • “look at” point • View plane normal
Canonical coordinate system • Canonical coordinate system • Convention is right-handed (looking down – z axis) • Convention for projection, clipping, etc.
Mapping • Transformation matrix maps camera basis vectors to canonical vectors in viewing coordinate system