Download
1 / 33
340 likes | 979 Views
5. Time Response. 5.1 Steady State Error 정상상태오차는 과도응답이 해소된 후 , 응답의 정밀성에 관련되는 특성이다 . ( 예 : 위치나 속도가 설정치 에 얼마나 가까운가하는 문제 ) 일반적으로 입력신호의 변화가 빠를수록 출력신호가 따라가기 어려워 지기 때문에 발생되며 , 실제로는 차수가 높은 입력에 대한 분석도 필요하지만 보통 단위계단함수 , 램프 함수 , 포물선 함수가 대표적인 성능평가 함수로 사용된다 .

E N D
5.1 Steady State Error 정상상태오차는 과도응답이 해소된 후, 응답의 정밀성에 관련되는 특성이다. (예:위치나 속도가 설정치 에 얼마나 가까운가하는 문제) 일반적으로 입력신호의 변화가 빠를수록 출력신호가 따라가기 어려워 지기 때문에 발생되며, 실제로는 차수가 높은 입력에 대한 분석도 필요하지만 보통 단위계단함수, 램프 함수, 포물선 함수가 대표적인 성능평가 함수로 사용된다. Prototype unity-feedback system 1.Steady State Error, ess 출력과 기준입력의 정상상태에서의 오차. 즉 위와 같은 표준단위궤환시스템에서 et = r(t) - y(t) rss는 r(t)의 정상상태부분 이므로 따라서, ess는 R(s)와 G(s)에 포함되어 있는 s-1갯수에 따라 특성이 달라지게 된다.
2.Type of Systems Loop transfer function G(s)가 다음과 같은 형태일 때, N을 시스템의 Type이라고 하며 (Type-N 시스템), G(s)에 포함되어 있는 적분기의 수(원점에 있는 극점의 수)에 해당한다. 일반적으로 Type이 높을수록 정상상태오차는 감소하나 적분의 특 성에 의해 불안정할 우려가 많아진다. 대표적인 입력함수에 따른 ess는 다음과 같다 3.System Type에 따른 Steady State Error
예제 1) Step input: Ramp input: Paraolic input: 예제 2) Step input: Ramp input: Parabolic input:
5. 2 Transient Response 과도응답은 시간이 지남에 따라 0으로 소멸되는 부분이지만, 그 동안 나타나는 진폭의 크기와 지속시간등은 시스뎀의 허용범위 이내로 유지시켜야 하므로 정상상태특성과는 또 다른 측면에서 매우 중요하다. 과도응답 특성 해석을 위해서 주로 사용되는 입력함수는 순간적인 변화가 가장 큰 단위계단 함수이다. 1.Time response of Prototype 2nd order system Prototype second order system 시간응답해석에서 가장많이 사용되는 전형적인 2차 시스템은 위의 그림과 같으며, 시간응답은 시스템 특성근의 위치에 따라 지수 또는 진동, 감쇄진동등의 형태로 나타난다. 특성근의 위치표시로는 직교좌표계( ) 형태보다는 응답특성과 직접관계되는 (damping ratio)와 (natural frequency)를 사용하는 것이 일반적이다
2.Closed-Loop system prototype 시스템의 closed loop transfer function M(s)과 특성근 특성근 를 로 나타내면, (damping factor) (damped frequency)3.Unit step response prototype 2nd orde system의 단위 계단 함수에 대한 응답은 다음과 같다. 이므로, 특성근의 형태에 따라 :overdamped. 는 두 실근.- :overdamped. 는 중근. - :overdamped. 는 두허근 :overdamped. 는 공액복소근. - - -
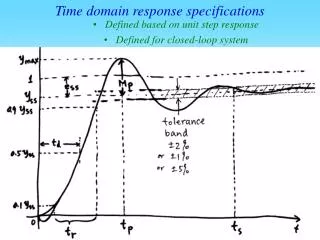
RISE TIME DELAY TIME 5. 3 time-domain specification for unit step response 전형적인 단위계단 함수 응답 곡선을 아래 설명화면에서 보인다. 이 곡선에 대해 시스템의 성능을 나타내는 척도로 주로 사용되는 항목으로 상승시간(tr), 정정시간(settling time: ts) 최대 오버슈트등 이 있으며 주로 와 에 의해 달라진다. Specifications of time response
SETTING TIME MAX. OVERSHOOT
- curve for prototye second-oder system 1.지연시간 (Delay time td) 최종치의 50%에 이르는기까지 걸리는 시간. y(t)=0.5의 해로부터 구할 수 있다. 그러나 실제 계산은 매우 복잡하므로, 일반적으로 아래 그림과 같이 - 곡선을 의 범위에서 에 대해 를 근사화한 1차식 또는 2차식의 공식으로부터 구한다.
- curve for prototye second-oder system 2.상승시간 (Rising time tr) 최종치의 10%에서 90%까지 도달하는데 걸리는 시간. 로 부터 상 승시간을 구할 수 있으나 계산이 복잡하므로 일반적으로 아래 그림과 같은 - 곡선으로 부터 구한다. 이 때에도, 지연시간의 경우와 마찬가지로 근사화기법을 이용하여 아래 그림과 같이 의 범위에서 에 대한 의 관계를 직선 또는 2차식으로 근사화한 식으로부터 구할 수 있다.
settling time 의 근사화 3.Settling time ts y(t)가 지정된 범위이내로 되는데 소요되는 시간. ( 아래 그림의 ) 그러나 실제로 이 시간을 구하 는 것은 복잡하므로 일반적으로 envelope 커브가 최종치가 지정된 범위이내로 도달하는데 걸리는 시간으로 한다. 통상 5%, 3%, 2%, 1% settling time이 주로 사용된다. 5% settling time
여기서 는 설정된 %에 따라 0.05, 0.03, 0.02, 0.01 등이고, 각각에 대해서 근사화하면, 아래의 표와 같이 공식화할 수 있다. 여기서는 에 대한 근사식이며, 를 다른 값으로 가정하면 분자의 계수가 조금씩 달라진다.
6.1 Basic concepts 1. 목적 파라미터 변화에 따른 시스템특성해석을 위해 특성 근의 궤적을 그래프로 나타냄. 2. 한 개의 변수 변화에 따른 근궤적도(Root locus , Root loci) ① Root Loci(RL) : 에 대한 근궤적 ② Complementary Root Loci(CRL) : 에 대한 근궤적 Note : 일반적으로 근궤적은 K>0 에 대해서만 작성하는 경우가 많음. Note : 두개 이상의 변수의 변화에 대한 근 궤적은 입체면이 되므로 Root contour(RC)라고 부름 폐루프 전달함수
폐루프 특성방정식 라면 에서 K의 변화에 따라, 특성방정식의 근의 위치 변화. 즉, 근궤적도 상에 있는 s는 위 식의 분자항을 만족한다. 또는 이 폐루프 특성방정식을 다음과 같이 표현 할 수도 있다. 즉, 근 궤적은 -을 만족하는 복소수의 집합이다. 단, K는 실수. 근 궤적이 되기 위한 조건 1) s 평면상의 한 점이 근궤적이 되기 위한 조건 인때 을 만족하므로, (K는 실수이어야 함.) 따라서 궤적도상에 있는 s는 다음 크기와 각 조건을 모두 만족하여야 한다.
- 크기조건 즉, - 각조건 ① ② 에 대한 적용의 예
크기조건. 각조건 (단,K>0인 경우).,
의 영점 : 을 만족하는 s 의 극점 : 을 만족하는 s 6. 2 Plotting Root Locus 1. 근궤적도 그리기 단계별 설명 폐루프 전달함수 폐루프 특성방정식 (1) 근궤적의 출발점 은 의 극점
(2) 근궤적의 도착점 은 의 영점 (3) 실수축 위의 근궤적의 존재 범위 : Root Roci : 실수축에서 구간의 오른쪽에 있는 영점과 극점의 수가 홀수인 영역 각조건으로부터 실수축상에서 왼쪽에 있는 영점, 극점과의 각은 모두 0이고 오른쪽에 있는 것과는 모두 이므로 오른 쪽에 있는 영점, 극점의수를 라 하면 이므로 가 홀수가 되어야 한다. Complementary Root Roci : 실수축에서 구간의 오른쪽에 있는 영점과 극점의 수가 짝수인 영역 각조건으로부터 실수축상에서 왼쪽에 있는 영점, 극점과의 각은 모두 0이고 오른쪽에 있는 것과는 모두 이므로 오른 쪽에 있는 영점, 극점의 수를 라 하면, 이므로 가 홀수가 되어야 한다.
(5) 점근선의 교차각도 Root Loci의 점근선 : Complementary Root Loci의 점근선 : 각조건으로부터 이면 s와 모든 영점, 극점과의 각이 로 같아지게 된다. 따라서 (4) 점근선의 교점 (centriod : ) 인 때,
(6) 이탈점, 안장점 (Break away point, Break in point) 을 만족하는 s들 중에서 Root Loci의 이탈점, 안장점 : 의 값이 음의 실수가 되게 하는 s Complementary Root Loci의 이탈점, 안장점 : 의 값이 양의 실수가 되게 하는 s 이탈점 혹은 안장점은 특성방정식의 다중근에 대응한다. 따라서 ( : 특성방정식의 r(짝수)중근으로써 이탈점 혹은 안정점) 이므로 이 된다. 따라서 이탈점 혹은 안정점은 을 만족하는 s들 중에서 의 값이 음의 실수가 되게 하는 s : Root Loci 의 값이 양의 실수가 되게 하는 s : Complementary Root Loci이다.
(8) 근궤적과 허수축과의 교점 방법 1 : Hurwitz 판별법을 이용하여 근궤적이 축을 통과하는 값(시스 템의 안정한 영역과 불안정한 영역의 경계값)과 값을 구한다.방법 2 : 특성방정식의 s에 를 대입해서 연립방정식을을 품으로써 근궤적 이 축을 통과하는 값과 값을 구한다. (7) 근궤적의 에서의 출발각과 도착각(Root-Loci) 출발각( : 극점) : 극점에서부터 출발하므로 다음의 각조건에서 이면 가 된다. 따라서 도착각( : 영점) : 영점으로 도착하므로 다음의 각조건에서 이면 가 된다. 따라서
근궤적도 그리기 예 1 단계 1. 근궤적의 출발점(K=0)은 G(s)H(s)의 극점 개루프 전달함수의 극점인 에서 근궤적도는 출발한다 (근 궤적 수는 5개).
단계 2. 근궤적의 도착점( )은 G(s)H(s)의 영점 G(s)H(s)의 극점에서 출발한 5개의 근궤적 중 하나는 s = -3(finite zero) 에 도달한다. 나머지는 점근선을 따라 무한대로 간다.
단계 3. 실수축 위의 근궤적 존재 범위 Root Loci( K > 0):실수축에서 구간의 오른쪽에 있는 영점과 극점의 수가 홀수인 영역.(그림에서 청색부분) Complementary Root Loci( K < 0 ):실수축에서 구간의 오른쪽의 영점과 극점의 수가 짝수인 영역.
단계 5. 점근선의 교차각도 Root Loci( K > 0 )의 점근선 : 따라서, 가 양의 K에 대한 점근선이 된다. Complementary Root Loci( K > 0 )의 점근선 : 그리고, , 가 음의 K에 대한 점근선이 된다.
단계 6. 이탈점 이 방정식의 근은 이것들 중 두쌍의 복소근에 대한 G1H1(s1)의 값이 실수가 되지 않으므로 취하지 않고, 나머지 실근 s= - 5.53만이 이탈점이 된다. 그림에서 이 영역이 이탈점이 됨을 확인 할 수 있다
단계 7. 근궤적의 출발각 에서의 출발각 이므로 k=-2라고 하면, 마찬가지 방법으로 에서의 출발각이 임을 알 수 있다
단계 8. 궤적과 허수축과의 교점 방법 1 : 근궤적이 허수축을 통과하는 점은 안정한 영역과 불안정한 영역의 경계이므로 Hurwitz 판별법을 적용하여 K를 구할 수 있다. 특성방정식 의 Routh's table은 다음과 같다. Routh's table의 첫 칼럼의 부호가 같아야 하므로 안정하기위한 조건은 다음과 같다. 따라서, K=35.514에서 근궤적이 허수축을 통과한다. 근궤적이 허수축과 만날 때의 는 다음과 같이 보조방정식으로부터 구할 수 있다.
방법 2 : 특성방정식의 s에 를 대입해서 연립방정식을 풀고 근궤적이 축을 통과하는 K값과 값을 구한다. 특성방정식 의 s에 를 대입하면 다음과 같다. 실수부와 허수부가 모두 0이 되어야 하므로 이다. 따라서 를 윗 식에 대입하면 즉, K=35.521에서 근궤적이 허수축의 인 점을 통과한다.
K값에 따른 Step response 비교 1 K=20(stable) 2 K=35.2(maginarily stable) 3 K=40(unstable)