Download
1 / 66
660 likes | 833 Views
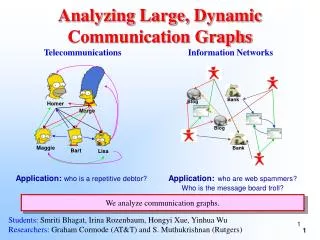
Visual Analysis of Large Graphs Using ( X , Y )-clustering and Hybrid Visualizations . V. Batagelj , W. Didimo , G. Liotta , P. Palladino , M. Patrignani ( Univ. Ljubljana , Univ. Perugia, Univ. Roma Tre ) In Proc. IEEE Pacific Visualization 2010. Outline.

E N D
Visual Analysis of Large Graphs Using (X, Y)-clustering and Hybrid Visualizations V. Batagelj, W. Didimo, G. Liotta,P. Palladino, M. Patrignani (Univ. Ljubljana, Univ. Perugia, Univ. Roma Tre) In Proc. IEEE Pacific Visualization 2010
Outline • The problem of visualizing large graphs • State of the art • Our contribution • Conclusions and open problems
The problem of visualizing large graphs • Some major issues in the visualization of large graphs: • Readability: optimization of aesthetic criteria • Scalability: fast computation • Visual complexity: interaction tools that allow users to limit the amount of information displayed on the screen • overview of the graph • details on demand • user’s mental map preservation
State of the art • Readability: there are many effective algorithms that are computationally fast for relatively small and sparse graphs (see the graph drawing book of Di Battista, Eades, Tamassia, Tollis , 1999)
State of the art • Scalability: there are some fast graph drawing algorithms based on physical or algebraic models; the drawings have high visual complexity and do not allow detailed views (see the survey of Hacul and Jünger, 2007)
State of the art • Visual complexity: draw the whole graph and then interact with it; ex. focus+context techniques, like fisheye view or hyperbolic layouts; conceived for tree-like graphs (see the survey of Herman, Melançon, Marshall, 2000)
State of the art • Interactive approaches for visualizing and exploring large graphs: • graph visualized incrementally or at different levels of details • strong interaction between the user and the drawing
Interactive Approaches • Bottom-up strategies: the graph is visualized a piece at a time • topological window moving through canvas (Eades et al. ,1997) • Limits: no overview, the user’s mental map preservation is difficult
Interactive Approaches • Bottom-up strategies: the graph is visualized a piece at a time • incremental enhancement of the drawing (ex. Carmignani et al., 2002) • Limits: no overview, the user’s mental map preservation is difficult without readability degradation
Interactive Approaches • Top-down approaches
Interactive Approaches • Top-down approaches • the graph is clustered (vertices are grouped together)
Interactive Approaches • Top-down approaches • the graph is clustered (vertices are grouped together) • a simplified view is shown (overview)
Interactive Approaches • Top-down approaches • the graph is clustered (vertices are grouped together) • a simplified view is shown (overview) • the user interactively explores the clusters (detailed views)
Interactive Approaches • Top-down strategies • the graph is clustered (vertices are grouped together) • a simplified view is shown • the user interactively explores the clusters • Limits • someone/something has to define clustering rules • existing clustering algorithms do not guarantee properties on the graph of clusters
Our contribution • A top-down approach with these ingredients: • a new clustering framework • new clustering algorithm within the framework • hybrid visualizations • A system: VHyXY • Some case studies
Basic Terminology: Clustering • G=(V, E): graph with vertex set V and edge set E • A cluster of G=(V, E) is a subset of V • A clusteringC of G isa set of disjoint clusters of G
Basic Terminology: Clustering • Thegraph of clusters H(G, C)is the graph obtained by collapsing each cluster of C into a single vertex and by replacing multiple edges with a single one
Basic Terminology: Clustering • Thegraph of clusters H(G, C)is the graph obtained by collapsing each cluster of C into a single vertex and by replacing multiple edges with a single one
A new clustering framework • Clustering algorithms usually detect groups of highly connected vertices without taking care of the graph of clusters • We adopt a new framework for the design of automatic clustering algorithms that guarantee: • desired properties for the clusters • desired properties for the graph of clusters
The (X,Y)-clustering • X and Y are two classes of graphs with certain properties • G is called an (X,Y)-graph if there exists a clustering of G such that: • each cluster induces a subgraphthat belongs to Y • the graph of clusters belongs to X
(X,Y)-graph example • Let X be the class of cycles and let Y be the class of K4
(X,Y)-graph example • Let X be the class of cycles and let Y be the class of K4
(X,Y)-graph example • Let X be the class of cycles and let Y be the class of K4 • The graph is a (cycle,K4)-graph
Interesting combinations • Xis some class of sparse graphs: • planar graphs, cycles, trees, paths, … • Y is some class of highly connected graphs: • cliques, subgraphs with high-degree vertices, … • One can think of using different visual paradigms and algorithms for drawing the graph of clusters and the subgraph induced by each cluster (hybrid visualization)
Remark on (X,Y)-clustering • (X, Y)-clustering was previously defined by Brandenburg (GD 1997), but his model requires that every vertex belongs to some cluster • Our model does not have this requirement, which poses severe practical limitations
The (X,Y)-clustering problem • Problem: Given a graph G and two desired classes X and Y, is G an (X,Y)-graph? • This problem is NP-hard in general • Theorem: Deciding whether G is a (planar, k-clique)-graph for desired k ≥ 5 is NP-hard • This result motivates us to look for some relaxation of cliques
K-core components • The subgraph induced by a cluster is ak-core component if it is a maximal connected subgraph such that every vertex has degree at least k 5-core component 4-core component 4-core component
(Planar, K-core component)-graphs • We investigate (X,Y)-graphs G such that: • X is the class of planar graphs • Y is the class of k-core components of G • In particular, for a given k > 0, one can ask whether G is a (planar, k-core component)-graph • this decision problem can be solved in polynomial time • we give a polynomial-time algorithm that finds the maximum k for which G is a (planar, k-core component)-graph, and that computes the corresponding clustering
Properties of (planar, k-core component)-graphs The union of all k-core components of G is called the k-core of G (the k-core of G, if it exists, is unique) Property. If Ghas the k-core Gk (for some k≥ 1), then Ghas the (k−1)-core G(k−1) and Gk ⊆ G(k−1) Lemma. If G is a (planar, k-core component)-graph then it is a (planar, (k−1)-core component)-graph
Proof of the lemma V1 V2
Proof of the lemma V1 V2 u(V1) u(V2) H(G, C)
Proof of the lemma V1’ V2’ u(V1) u(V2) H(G, C)
Proof of the lemma V1’ V2’ u(V1) u(V1’) u(V2) u(V2’) H(G, C) H(G, C’)
Proof of the lemma V1’ V2’ u(V1) u(V1’) u(V2) u(V2’) H(G, C) H(G, C’)
Clustering Algorithm • Theorem: Let G be a graph with n vertices and m edges. There exists an O((n+m)log n)-time algorithm that computes the maximum k for which G is a (planar, k-core component)-graph, and the corresponding clustering • Steps of the algorithm: • Compute core-numbers for the vertices • Perform a binary search on core-numbers • For each graph of clusters, test its planarity
Algorithm animation • Compute the core number of each vertex, i.e., the maximum k for which there exists a k-core that contains the vertex
Algorithm animation • Compute the core number of each vertex, i.e., the maximum k for which there exists a k-core that contains the vertex 3 4 5 3 3 2 5 3 5 2 5 4 5 4 4 5 2 4 4 1 1
Algorithm animation 1 2 3 4 5 3 4 5 3 3 2 5 3 5 2 5 4 5 4 4 5 2 4 4 1 1
Algorithm animation 1 2 3 4 5 3 4 5 3 3 2 5 3 5 2 5 4 5 4 4 5 2 4 4 1 1
Algorithm animation 1 2 3 4 5 3 4 5 3 3 2 5 3 5 2 5 4 5 4 4 5 2 4 4 1 1
Algorithm animation 1 2 3 4 5 2 2 2 1 1 G is Planar
Algorithm animation 1 2 3 4 5 3 4 5 3 3 2 5 3 5 2 5 4 5 4 4 5 2 4 4 1 1
Algorithm animation 1 2 3 4 5 3 4 5 3 3 2 5 3 5 2 5 4 5 4 4 5 2 4 4 1 1
Algorithm animation 1 2 3 4 5 3 4 3 3 2 3 2 K5 4 4 4 2 4 4 G is not Planar 1 1
Algorithm animation 1 2 3 4 5 3 4 5 3 3 2 5 3 5 2 5 4 5 4 4 5 2 4 4 1 1
Algorithm animation 1 2 3 4 5 3 4 5 3 3 2 5 3 5 2 5 4 5 4 4 5 2 4 4 1 1
Algorithm animation 1 2 3 4 5 3 3 3 2 3 2 Maximum k = 4 2 1 1 G is Planar
Hybrid Visualizations • The (X, Y)-clustering technique can be used to design hybrid visualizations • combination of different drawing conventions for different parts of the graph • Example: • node-link representation for sparse subgraphs • matrix-based representation for dense subgraphs • Highly readable drawings for the graph of clusters (which is always planar)
Matrix based representation • Matrix-based representation • vertices are rows and columns • edges are cells • The ordering of vertices in rows/columns may strongly affect the number of crossings in the drawing