Download
1 / 10
100 likes | 294 Views
State-of-the-Art in Space Tele-Robotics. May 2, 2012. State-of-the-Art in Space Tele-Robotics. Panel 3: Robert Ambrose (JSC) Brian Wilcox (JPL) Terry Fong (ARC) Andre Schiele (ESA) David Akin (UMd). National Robotics Initiative (NRI) NSF, NASA, NIH, USDA .

E N D
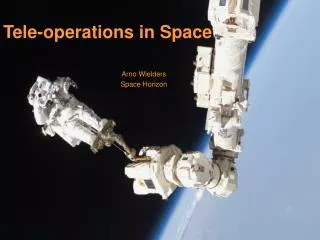
State-of-the-Art in Space Tele-Robotics May 2, 2012
State-of-the-Art in Space Tele-Robotics Panel 3: Robert Ambrose (JSC) Brian Wilcox (JPL) Terry Fong (ARC) Andre Schiele (ESA) David Akin (UMd)
National Robotics Initiative (NRI)NSF, NASA, NIH, USDA. President Obama, June 2011 at CMU
Tele-Robotics Challenges in Space • Space defines “Tele” at the grandest scales • Time delay • Loss of communication • Damping actions of gravity are often not present • Can’t stop and settle • Complex dynamics • Extreme temp, lighting • Stresses cameras
One of the key ideas: Time Ideas: Predictors Time/position clutching Compliance control Sensory substitution Wave transformations Supervisory control Questions: Urgency/pace in space Task completion times Thomas B. Sheridan, “Space Teleoperation Through Time Delay: Review and Prognosis”, IEEE Transactions on Robotics and Automation, October 1993.
Some Words of Wisdom Thomas B. Sheridan, “Space Teleoperation Through Time Delay: Review and Prognosis”, IEEE Transactions on Robotics and Automation, October 1993.
Robonaut 2 ISS Update • R2 Launched February 2011 • STS 133 • R2 Unpacked March 2011 • Punk’d by Crew • R2 Power Up August 2011 • Thermal model validation • R2 Safety Checkout Sept 2011 • Human safety • Handshake in Space Feb 2012 • First human contact • Sign Language Feb 2012 • Signed “Hello World” • First Task Air Velocity Mar 2012 • Held sensor to measure ducts • Task Board April 2012 • Flipped and verified switches
Robonaut Clips • Task Board Automation (Hart et al) • Vision to coarse alignment • Tactile and haptic sensing • Learning • Vision to confirm task execution • Zero Gravity Climbing (Radford et al) • Hand rail grasping • Object carrying • Tunnel navigation
Robonaut 2 and Centaur 2 • Mobile Manipulation (Diftler, Bluethmann, et al) • Mobile Rover Base • Crab Drive • Active Suspension • Manipulators • Robonaut 2 Torso • Digger Tool • Supervised Autonomy (Hambuchen) • Operated Across 50 s time ‘delay • Supervisor Designates Rock • Robot Drive and Grasps • Tell Robot “Wrong Rock”