Download
1 / 20
200 likes | 371 Views
Prognosis of gear health using stochastic dynamical models with online parameter estimation. Matej Ga š perin, Pavle Bo š koski, Đani Juričić “ Jožef Stefan ” Institute, Ljubljana, Slovenia. 10th International PhD Workshop on Systems and Control a Young Generation Viewpoint

E N D
Prognosis of gear health using stochastic dynamical models with online parameter estimation Matej Gašperin, Pavle Boškoski, Đani Juričić “Jožef Stefan” Institute, Ljubljana, Slovenia 10th International PhD Workshop on Systems and Controla Young Generation Viewpoint Hluboka nad Vltavou, Czech Republic, September 22-26, 2009
Motivation • An estimated 95% of installed drives belong to older generation - no embedded diagnostics functionality - poorly or not monitored • These machines will still be in operation for some time! • Goal: to design a low cost, intelligent condition monitoring module Prognosis of gear health using stochastic dynamical models with online parameter estimation
Outline • Introduction • Experimental setup • Feature extraction • State-space model of the time series • Parameter estimation using EM algorithm • Experimental results • Conclusion Prognosis of gear health using stochastic dynamical models with online parameter estimation
Problem setup • Gear health prognosis using feature values from vibration sensors • Model the time series using discrete-time stochastic model • Online parameter estimation • Time series prediction using the estimated model • Prediction of first passage time (FPT) Prognosis of gear health using stochastic dynamical models with online parameter estimation
Experimental setup • Experimental test bed with motor-generator pair and single stage gearbox Prognosis of gear health using stochastic dynamical models with online parameter estimation
Experimental Setup • Experiment description • 65 hours • 390 samples • constant torque (82.5Nm) • constant speed (990rpm) • accelerated damage mechanism (decreased surface area) Prognosis of gear health using stochastic dynamical models with online parameter estimation
Experimental Setup • Vibration sensors • Signal acquisition Prognosis of gear health using stochastic dynamical models with online parameter estimation
Feature Extraction • For each sensor, a time series of feature value evolution is obtained Prognosis of gear health using stochastic dynamical models with online parameter estimation
State space model of a time series • Consider a time series as an output of a SDSSM: • Assuming that functions f and g are linear and that the system has no measurable inputs leads to the following form: Prognosis of gear health using stochastic dynamical models with online parameter estimation
DSSM estimation via EM algorithm • Expectation – Maximization is applied as an iterative method to calculate a maximum likelihood estimate of unknown parameters (Θ). • And the iterative scheme is given as: • Algorithm alternates between maximizing the likelihood function with respect to hidden system states (M-step) and with respect to unknown parameters (E-step) Prognosis of gear health using stochastic dynamical models with online parameter estimation
E – step of EM algorithm • In dynamic systems with hidden states, E-step directly corresponds to solving the smoothing problem. • Given an estimate of parameter values • an optimum estimate of system states, can be obtained by employing the Rauch-Tung-Striebel (RTS) smoother Prognosis of gear health using stochastic dynamical models with online parameter estimation
M – step of EM algorithm • Maximization of the objective function l(Θ, Θ’), rather than data log-likelihood function • l(Θ, Θ’) is bounded fromabove by L(Θ) • increasing the value of l(Θ, Θ’) will increase the value of L(Θ) Prognosis of gear health using stochastic dynamical models with online parameter estimation
M – step of EM algorithm • Complete data log-likelihoodl(Θ, Θ’): Prognosis of gear health using stochastic dynamical models with online parameter estimation
M – step of EM algorithm • Taking the expected value of l(Θ, Θ’) with respect to the current parameter estimate and complete observed data: • Derivatives of the function with respect to all parameters can be calculated analytically Prognosis of gear health using stochastic dynamical models with online parameter estimation
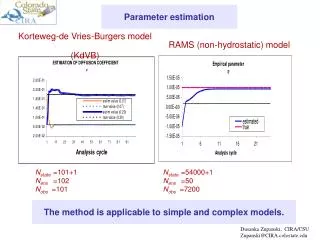
Estimation setup • Model structure • Model parameters are estimated using a time window of 100 samples • Convergence is achieved when log-likelihood increase is less than 10-4 Prognosis of gear health using stochastic dynamical models with online parameter estimation
Online tracking of model parameters • Time series • Eigenvalues of system matrix A • Diagonal elements of noise covariance matrix Q Prognosis of gear health using stochastic dynamical models with online parameter estimation
Prediction of first passage time • The goal of prediction was to determine when the extracted feature will exceed a certain value • For each time window, system parameters were estimated • Using estimated model, MC simulation was performed and time when the predicted value becomes greater than a certain threshold was obtained • For each time window, the simulation was performed 1000-times, so the result is a distribution of time Prognosis of gear health using stochastic dynamical models with online parameter estimation
Prediction of first passage time Prognosis of gear health using stochastic dynamical models with online parameter estimation
Prediction of first passage time Prognosis of gear health using stochastic dynamical models with online parameter estimation
Conclusion • Second order dynamical system is sufficient to model the dynamical behavior of vibration feature value • Using the ML estimate of the parameters, accurate prediction of first passage time can be made 15-20 hours in advance • Comparison to linear regression: Prognosis of gear health using stochastic dynamical models with online parameter estimation