Download
1 / 28
280 likes | 420 Views
Climate Change Projections for Switzerland: A Bayesian Multi-Model Combination using ENSEMBLES Regional Climate Models. Andreas Fischer, Andreas Weigel, Mark Liniger, Christoph Buser, Christof Appenzeller. 11 th International Meeting on Statistical Climatology, 12 July 2010, Edinburgh.

E N D
Climate Change Projections for Switzerland: A Bayesian Multi-Model Combination using ENSEMBLES Regional Climate Models Andreas Fischer, Andreas Weigel, Mark Liniger, Christoph Buser, Christof Appenzeller 11th International Meeting on Statistical Climatology, 12 July 2010, Edinburgh
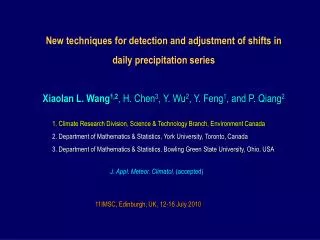
HIRHAM (DMI) HIRHAM (Met.No) BCM RCA (SMHI) CLM (ETHZ) PROMES (UCLM) RRCM (VMGO) Standard sens. HIRHAM (DMI) HadRM3 (Met Office) BCM RCA (SMHI) HadCM3 HIRHAM (Met.No) CLM (ETHZ) RCA3 (C4I) Standard sens. High sens. HadRM3 (Met Office) HadRM3 (Met Office) RCA3 (C4I) High sens. HadRM3 (Met Office) SRES A1B HadCM3 HadRM3 (Met Office) Low sens. RCA (SMHI) HadRM3 (Met Office) Low sens. REMO (MPI) RCA (SMHI) HIRHAM (DMI) REMO (MPI) ECHAM5 RACMO (KNMI) HIRHAM (DMI) ECHAM5 RCA (SMHI) RACMO (KNMI) RCA (SMHI) REGCM3(ICTP) REGCM3(ICTP) ALADIN v1 (CNRM) ALADIN v2 (CNRM) ALADIN v2 (CNRM) ARPEGE ARPEGE HIRHAM (DMI) HIRHAM (DMI) CGCM3 CRCM (OURANOS) IPSL CLM (GKSS) ENSEMBLES R2TB 6 AOGCMs / 15 Model Chains 8 AOGCMs / 21 Model Chains AOGCMs RCMs@25km Final Report (2009) RCMs@25km AOGCMs 1950 - 2050 2050 - 2100
PDF Derivation of Probablistic Scenarios Modelled Climate Change Signals Bayes Algorithm (Buser et al., 2009) ? Assumptions transparent
Bayesian Multi-Model Combination (Buser et al., 2009) Obs NOW Models NOW „Obs“ FUTURE Models FUTURE Seasonally averaged 30yr time periods
NOW FUTURE Bayesian Multi-Model Combination (Buser et al., 2009) Obs NOW Models NOW „Obs“ FUTURE Models FUTURE Mean Climate Shift Model Projection Errors
NOW FUTURE Bayesian Multi-Model Combination (Buser et al., 2009) Obs NOW Models NOW „Obs“ FUTURE Models FUTURE Mean Climate Shift Model Projection Errors • μ and βi non identifiable • Assumption has to be taken about projection error Δβi ~ N(0; σ2β)
Bayesian Multi-Model Combination (Buser et al., 2009) Obs NOW Models NOW „Obs“ FUTURE Models FUTURE Prior p(x) Posterior p(x|data) P(x|data) p(x) * p(data|x) Gibbs Sampler Likelihood p(data|x)
Sensitivity Experiments: Effect of Likelihood All prior distributions set to be uninformative Likelihood affects variance and location of posterior distribution Climate Change Signal
Bayesian Multi-Model Combination (Buser et al., 2009) Obs NOW Models NOW „Obs“ FUTURE Models FUTURE Prior p(x) Posterior p(x|data) P(x|data) p(x) * p(data|x) Gibbs Sampler Likelihood p(data|x)
Sensitivity Experiments: Effect of Prior Mean Climate Shift The uncertainty in Δμ is increased with a wider prior-setting for Δβi Projection Uncertainty
CC Signal CC Signal Sensitivity Experiments: Effect of Prior Outlier CC Signal Informative Prior Δβi Central tendency of posterior distributions also affected by prior Non-Informative Prior Δβi
Application of Algorithm using ENSEMBLES data Different considerations: • Estimation of Projection Uncertainty (σ2β) • Role of Internal Variability • Independent Model Data
(1) GCM Uncertainty (2) RCM Uncertainty 8 different GCMs HadCM3Q0 ECHAM Smoothing of timeseries by polynomial fit (Hawkins & Sutton, 2009) 1. Estimating Projection Uncertainty Assumption: Projection Uncertainty is fully sampled by range of available model simulations
2. Internal Variability • As a pre-processing step we remove internal variability from time-series • Calculate posterior distributions with Bayes Algorithm • Add internal variability to posterior distribution of μ
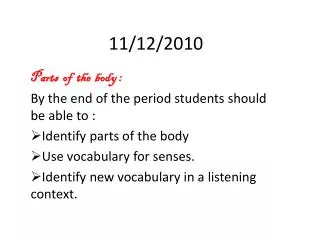
2. Internal Variability Summer Temperature over CHNE (Model: ETHZ – HadCM3Q0) 4th order polynomial fit 30-yr Running Mean (Hawkins and Sutton, 2009)
2. Internal Variability Summer Temperature over CHNE (Model: ETHZ – HadCM3Q0) 4th order polynomial fit 30-yr Running Mean (Hawkins and Sutton, 2009)
ECHAM Average all RCMs driven by the same GCM HadCM3Q0 3. Independent Model Data DJF Temperature 1980-2009 (AL) ECHAM HadQ0 HadQ3 HQ16 ARP. BCM ECHAM HadQ0 HadQ3 HQ16 ARP. BCM
Probabilistic Climate Change Scenarios Northeastern Switzerland Reference Period 1980 - 2009 Orography of Switzerland
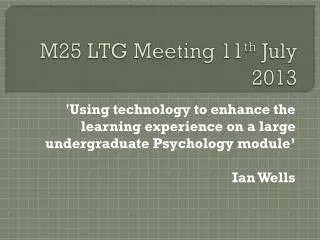
Swiss Climate Scenario (A1B) Temperature (K) 2035 GCM groups 2060 2084 GCM-RCM chains Internal Variability
Swiss Climate Scenario (A1B) Relative Precipitation 2035 2060 2084 GCM groups GCM-RCM chains Internal Variability
Conclusions The Bayes Algorithm by Buser et al. (2009) is a transparent tool for generating probabilistic climate change scenarios. The uncertainty range in the climate change signal is highly dependent on the prior-settings of the projection uncertainty. The Buser Algorithm does not account for internal variability. To circumvent this problem a pragmatic solution has been proposed. The probabilistic climate change scenarios for Northeastern Switzerland show a continous increase in temperature over the 21st century. For precipitation only in summer a signal in the second half of the century is detectable.
2060 2084 2035 JJA Precipitation Change [%] Swiss Climate Scenarios: Precipitation 2035 2060 2084 DJF Precipitation Change [%]
Effect correlated models Delta Mu JJA T2 CHN ECHAM av. / HadQ0 av. / HadQ3 av. / HadQ16 av. / CNRM-ARPEGE / BCM av. / OURANOS Average of 1 GCM group / Rest as standard KNMI-ECHAM / ETHZ-HadQ0 / SMHI-HadQ3 / C4I-HadQ16 / CNRM-ARPEGE / SMHI-BCM / OURANOS
Climate Scenarios Global Mean Temperature wrt 1980-2009 A2 ? A1B B1 [K] comm 2084 2060 2035
Pattern Scaling with CMIP A1B Bayes Estimate 2035 Scaled from 2060 Scaled from 2084 Temperature Relative Precipitation
Swiss Climate Scenarios A1B B1 A2
Aim: Update of Probabilistic Scenarios Probabilistic Scenarios for Northern and Southern Switzerland based on PRUDENCE RCM simulations Temperature Relative Precipitation OcCC (2007) 2030 2050 2070
Temperature (°C) Model validation (1980 – 2009) EOBS v3 Orography CHNE CHW Precipiation (mm/mt) CHS Temperature (°C) EOBS v3 EOBS v3