Download

1 / 11
110 likes | 120 Views
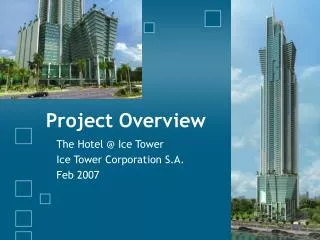
Join the autonomous robotics design challenge to build and program industrial robots for specific tasks. Explore sensors, test autonomous robots, and design solutions for industrial applications. Develop a final autonomous robot build, program it for industrial tasks, and integrate sensors for functional outcomes. Learn about specific existing industrial robots and their styles. Study and analyze a FANUC system to understand typical equipment and sub-systems. Participate in team roles for CAD design, 3D printing, project management, and testing. Solve build problems using visual solutions and assemble your robot solution for testing in manufacturing systems.

E N D
Project Overview • Introduction to Factory Automation Numerical Control • Build an autonomous robotic solution • Testing an autonomous robot build by human control • Programming a autonomous robot • Exploring sensors • Autonomous robot design challenge • Autonomous robot design challenge • Industrial applications build challenge • Industrial applications build challenge • Industrial applications build challenge • Industrial applications robot delivery • Manufacturing system design challenge
LESSON 10 STARTER Learning objective: Develop a final autonomous robot build, programme the robotic solution to perform an industrial task, and integrate sensors into the functional outcome to meet the needs of the specification. Styles for specific existing industrial robotsA typical robot design will take a consistent form based on the task it is doing. Task:Consider the robot shown right. This robot does not have the ability to turn on its base, it can only move forward and backward using the linkage system you can see. Create a card model of this robot in 2D, using split pins to make pivot points. Simulate the movement of this robot and try to decide why it is designed to move in this way.
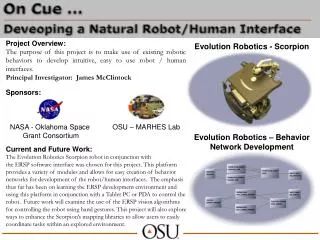
autonomous Robotics Industrial Apps System Case StudyIn your teams, you are now going to conduct a brief study and analysis of a FANUC system. This will support your design and development work, as it will give you first hand insight into what a typical system looks like, what it takes in terms of equipment and sub systems, and how systems can function. Task:Open up the folder titled “FANUC Example System”Review the video and then each of the photos in turn.Once you have discussed in your teams what you have identified, piece together an electronic report, using the photos, that states the following:“This example system is design to…It is successful because it features…” Key words: CAD, Library, heat processes, acrylic, MDF, profile, forming.
autonomous Robotics Industrial Apps Today’s buildYour task is to build for the next two lessons. In these lessons, as a team you are going to be assigned team roles. Each of you will have a series of jobs you will need to complete as part of the team.The roles are as follows. Decide who does what based on your skill set. Role 1Take photographic evidence of the build at each stage (every 20 minutes)Organise these photos into a report about the build.Build as part of the team Role 2Draft up the CAD file for this assembly, in sections or as a whole build.Create renderings of the assembly.Build as part of the team Role 3Create bespoke 3D printed parts of the actuator to attach to your robot to make picking up the objects easier. 3D print the outcomes and test.Build as part of the team Role 4Project manage the team and lead the project to its deadline. Ensure all team members are on task, have sufficient skills and support, and can deliver.Build as part of the team
autonomous Robotics Industrial Apps Today’s buildUse these visuals to help you solve build problems, and as a team, assemble your robot solution ready for testing. Grabbing a round object?This simple system from an early VEX robot design provides you with the ability to draw in and hold a consistently shaped object, then release it. Using the small wheels as the intake system also means you can control the object precisely. Turn without a turntableThis system is formed by mounting a claw onto a high strength gear, and turning this gear using a smaller gear. The whole system is mounted onto a small steel plate and cable management tucks the motor controllers to one side and out of the teeth of the gears. Need a controlled arm lift?This simple system uses a chain and sprocket gear set so that the arm (right) can lift and lower in a controlled way. The weight of the motor is taken by the base (left) and the chain movement can be adjusted using different size sprocket gears and motor speeds.
autonomous Robotics Industrial Apps Today’s buildUse these visuals to help you solve build problems, and as a team, assemble your robot solution ready for testing. Expecting a light lift?This system is an example of a light build, with minimal materials to make the actuator. If you can, only use the claw if it will do the task perfectly, otherwise design your own actuator which can then be much lighter and scaled to fit the object you are trying to pick up. Expecting a heavy lift?Gearing is important to not overload the motors. In this lift, the smallest gear is moving the largest gear, so whilst the speed will be much slower then the motors maximum output, the movement will be more controlled and help with heavy lifting. Move to high strength gears and change the motor gear ratio to modify the build, or add a second motor to the opposite side for an extra boost. A lot to take in?This system uses the tank tread kit as an intake system for multiple objects. They are all stored on the actuator, and all dispensed in the same way.
autonomous Robotics Industrial Apps Reminder of VEX build arrangementsUse these examples to help you to incorporate specific features to your robot solution.
LESSON 10 Plenary As a class, let us consider the following questions?A. What elements of the robot build could you not achieve?B. What aspects of the specification did you meet?C. How could you have adapted the specification or robot so that they match perfectly?D. How has/will programming had/have an affect on the build, and vice versa?
LESSON 10 Summary Learning objective: Develop a final autonomous robot build, programme the robotic solution to perform an industrial task, and integrate sensors into the functional outcome to meet the needs of the specification. • Today you have: • Developed your final build into a finished robot solution • Programmed your robot to function and perform • Ensured your robot meets the specification in all technical aspects