Download
1 / 5
50 likes | 147 Views
Richard M. Murray Zhipu Jin Ling Shi Demetri Spanos Vijay Gupta Raktim Bhattacharya Andrea Bertozzi Dan Marthaler Nicolas Foirien Jeremy Malaize Michael Yeh Hans Scholze (?) Jing Xiong Jon Gibbs Brian Beck

E N D
Richard M. Murray Zhipu Jin Ling Shi Demetri Spanos Vijay Gupta Raktim Bhattacharya Andrea Bertozzi Dan Marthaler Nicolas Foirien Jeremy Malaize Michael Yeh Hans Scholze (?) Jing Xiong Jon Gibbs Brian Beck (Julia Ma) Rajiv Ghanta Alex Sutherland (Andrew Kwok) Chung Hua Hsieh Boa Quoc Nguyen David Tung RoboFlag/Coop Control 24 June 2004
4:00-4:05 Meeting Goals, Agenda and Notetaker • Goals • Review timeline and upcoming activities • Review team activities, using status charts • Agenda: • 4:00 Review goals and agenda; select notetaker • 4:05 Upcoming events • 4:15 Team updates: vehicle, positioning, C2 • 4:45 Vehicle architecture discussion • 5:00 Adjourn • Notetaker: ______________________ • Record notes and action items from meeting in electronic format • Post on project wiki after meeting; send out e-mail with URL • Rotate responsibility between group members Richard Murray, Caltech
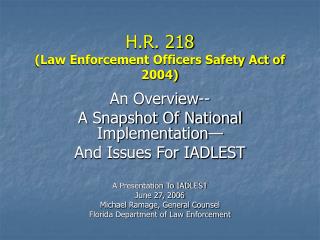
Vehicles Posit’ning 4:10-4:15 Updated: 21 Jun 04 RoboFlag MVWT II Project Timeline Wk 1 Wk 2 Wk 3 Wk 4 Wk 5 Wk 6 Wk 7 Wk 8 Wk 9 Wk 10 Wk 11 Wk 12 Team 6/14 6/21 6/28 7/5 7/12 7/19 7/26 8/2 8/9 8/16 8/23 8/30 Hovercraft v2a software, 7/9 • Hovercraft v2b software, 7/23 Draft system architecture, 7/1 System architecture review, 7/8 Review potential roof solutions, 6/24 Downselect roof selection, 7/9 Initial roof implementation, 7/22 Vision system analysis, 6/24 Vision system improvements, 7/9 RoboFlag Competition Institute Holiday RoboFlag competition #1, 6/16 Final RoboFlag competiion, 8/19 Local RoboFlag in svn, 6/24 RoboFlag on Roof, 7/30 RoboFlag on MVWT II, 7/9 Draft team charts, 6/24 AFOSR demo, 8/10 Final team charts, 7/1 Lab cleanup, 7/6 Design review, 7/22 Project meetings: Thu, 4-5 pm Richard Murray, Caltech
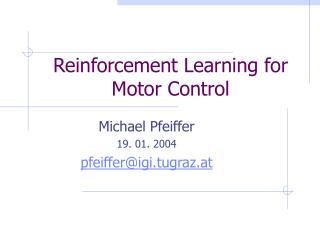
4:15-4:45 Owner HELP! Needs work Interface Working Updated: 13 Jun 04 Team Updates • Work divided into 3 teams • Vehicle: HW + inner loop SW • Positioning: indoor and outdoor positioning • Command & Control: offboard interfaces to testbed Lab/Roof Positioning System • Command and • Control System • Testbed operation • Data logging andvisualization • RoboFlag API Vehicle User Applications (SURF projects) Review activities and status charts Richard Murray, Caltech
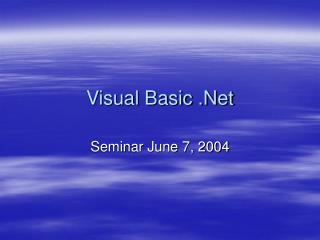
4:45-5:00 Vehicle Architecture (Kelly II) LAPTOP LAPTOP VEHICLE 802.11b Controller Library (LQR,NTG, MPC etc) Vision System Vision Module OR QNX RTOS Simulator Onboard Sensors RHexLib Module Manager PIC code USB Driver Controller Shell 802.11b Data Logger (Other vehicles) Motors RHexComm Master controller /User Interface Richard Murray, Caltech





![The CENVAT Credit Rules, 2004. [ Notification no. 23/2004-C.E. (NT) dated 10.09.2004]](https://cdn3.slideserve.com/5711726/the-cenvat-credit-rules-2004-notification-no-23-2004-c-e-nt-dated-10-09-2004-dt.jpg)