Download
1 / 27
270 likes | 403 Views
Frame-Level Pipelined Motion Estimation Array Processor. Surin Kittitornkun and Yu Hen Hu. IEEE Trans. on, for Video Tech., Vol. 11, NO.2 FEB, 2001. OUTLINE. Methodology for VLSI Array Processors Design An Example on Frame Level Block Matching Algorithm. Design Levels. Sequential Algorithm

E N D
Frame-Level Pipelined Motion Estimation Array Processor Surin Kittitornkun and Yu Hen Hu IEEE Trans. on, for Video Tech., Vol. 11, NO.2 FEB, 2001
OUTLINE • Methodology for VLSI Array Processors Design • An Example on Frame Level Block Matching Algorithm
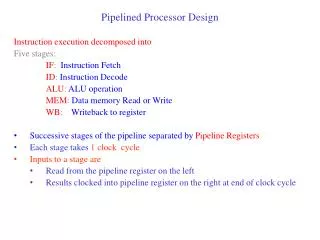
Design Levels • Sequential Algorithm • 1.DG Design • 2.SFG Design • 3.VLSI Array Design
DG: 1.Shift Invariant Shift-Unvariant DG for Sorting Algorithm Forifrom 1 to N Forjfrom 1 to i m(i+1,j) <- max[x(i,j), m(i,j)] x(i,j+1) <- min[x(i,j),m(i,j)]
DG: 2.Localization Broadcast vs. Transmittent Data
DG: 3.Reversible Arcs for Associative Operations • If the operation used in the recursion is associative, then the directions of the arcs may be reversible.
DG: 4.Localization with Intermediate Variables Involved • AR Filtering Algorithm
DG: 4.Localization with Intermediate Variables Involved • AR Filtering Algorithm • Spiral Communication Approach • Local Communication Approach
Signal Flow Graph (SFG) Input(1) Output(1) x(n) x(n-1) D Input(2) Output(2)
SFG Projection Procedure • For any projection direction, a processor space is orthogonal to the projection direction. • Replace the arcs in the DG with zero or nonzero delay edges between their corresponding processors. • Attach the input and output data to their corresponding processors.
Projection Example Insertion sorting Insertion Sorting Selection Sorting Insertion Sorting Selection sorting Bubble sorting
SFG to Systolic Array • Replace Operation Node with PE. • Place data and Input/Output pin with delay units.
Frame-Level Pipelined Motion Estimation Array Processor Surin Kittitornkun and Yu Hen Hu IEEE Trans. on, for Video Tech., Vol. 11, NO.2 FEB, 2001
kth-clock cycle kth-clock cycle (v-1)NhN2 (h-1)N2 (i-1)N j
2D Localized DG of row 1, v=1 2p+1 2p+1 Search area and current frame coordinates of Nv = 3; Nh = 2; p =N/2 = 1.
Linear SFG of (2p + 1)2 PEs, p = N/2 = 1 after systolic mapping of 2-D DG.
Linear SFG of (2p + 1)2 PEs, p = N/2 = 1 after systolic mapping of 2-D DG.