Download
1 / 1
10 likes | 183 Views
Q i. r ij. q ij. Soft Channel Decoder (BCJR). ext. Noise Prediction and LDPC Decoding. PR Channel. Assume a memoryless channel with additive colored noise Channel model is , Colored noise model is. Soft ECC Decoder (LDPC). Colored Noise. ext.

E N D
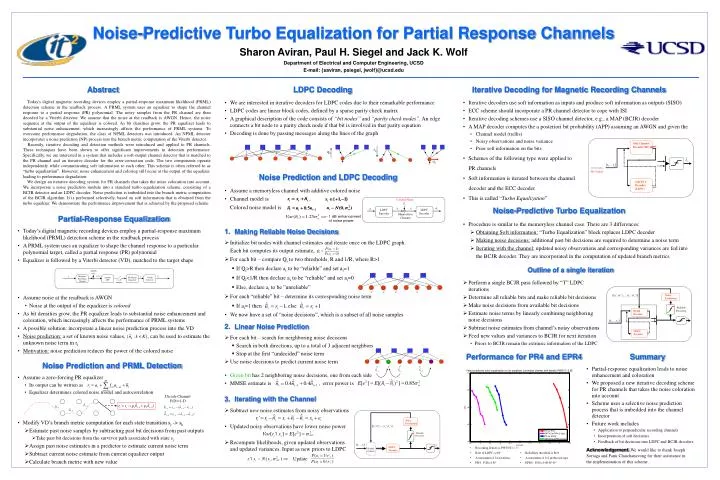
Qi rij qij Soft Channel Decoder (BCJR) ext. Noise Prediction and LDPC Decoding PR Channel • Assume a memoryless channel with additive colored noise • Channel model is , Colored noise model is Soft ECC Decoder (LDPC) Colored Noise ext. LDPC Encoder LDPC Decoder Memoryless Channel • Initialize bit nodes with channel estimates and iterate once on the LDPC graph. Each bit computes its output estimate, • For each bit – compare Qi to two thresholds, R and 1/R, where R>1 • If Qi>R then declare ai to be “reliable” and set ai=1 • If Qi<1/R then declare ai to be “reliable” and set ai=0 • Else, declare ai to be ”unreliable” • For each “reliable” bit – determine its corresponding noise term • If ai=1 then , else • We now have a set of “noise decisions”, which is a subset of all noise samples √ √ √ √ • Assume noise at the readback is AWGN • Noise at the output of the equalizer is colored • As bit densities grow, the PR equalizer leads to substantial noise enhancement and coloration, which increasingly affects the performance of PRML systems • A possible solution: incorporate a linear noise prediction process into the VD • Noise prediction: a set of known noise values, , can be used to estimate the unknown noise term in ri • Motivation: noise prediction reduces the power of the colored noise Noise Prediction Reliable Decisions BCJR Decoder • For each bit – search for neighboring noise decisions • Search in both directions, up to a total of J adjacent neighbors • Stop at the first “undecided” noise term • Use noise decisions to predict current noise term • Green bit has 2 neighboring noise decisions, one from each side • MMSE estimate is ,error power is LDPC Decoder √ √ √ √ Dicode Channel F(D)=1-D Noise Prediction Reliable Decisions Channel estimates LDPC Decoder • Recording density is PW50/T=2.85 • Rate of LDPC is 8/9 • A maximum of 24 iterations • PR4: F(D)=1-D2 • Reliability threshold is R=9 • A maximum of J=2 prediction taps • EPR4: F(D)=1+D-D2-D3 AWGN Magnetic Recording Channel PR Digital Equalizer Viterbi Detector Analog LPF t = iT sampler Noise-Predictive Turbo Equalization for Partial Response Channels Sharon Aviran, Paul H. Siegel and Jack K. Wolf Department of Electrical and Computer Engineering, UCSD E-mail: {saviran, psiegel, jwolf}@ucsd.edu Abstract LDPC Decoding Iterative Decoding for Magnetic Recording Channels Today's digital magnetic recording devices employ a partial-response maximum likelihood (PRML) detection scheme in the readback process. A PRML system uses an equalizer to shape the channel response to a partial response (PR) polynomial. The noisy samples from the PR channel are then decoded by a Viterbi detector. We assume that the noise at the readback is AWGN. Hence, the noise sequence at the output of the equalizer is colored. As bit densities grow, the PR equalizer leads to substantial noise enhancement, which increasingly affects the performance of PRML systems. To overcome performance degradation, the class of NPML detectors was introduced. An NPML detector incorporates a noise prediction (NP) process into the branch metric computation of the Viterbi detector. Recently, iterative decoding and detection methods were introduced and applied to PR channels. These techniques have been shown to offer significant improvements in detection performance. Specifically, we are interested in a system that includes a soft-output channel detector that is matched to the PR channel and an iterative decoder for the error-correction code. The two components operate independently while communicating soft information to each other. This scheme is often referred to as “turbo equalization”. However, noise enhancement and coloring still occur at the output of the equalizer, leading to performance degradation. We design an iterative decoding system for PR channels that takes the noise coloration into account. We incorporate a noise prediction module into a standard turbo equalization scheme, consisting of a BCJR detector and an LDPC decoder. Noise prediction is imbedded into the branch metric computation of the BCJR algorithm. It is performed selectively, based on soft information that is obtained from the turbo equalizer. We demonstrate the performance improvement that is achieved by the proposed scheme. • We are interested in iterative decoders for LDPC codes due to their remarkable performance • LDPC codes are linear block codes, defined by a sparse parity check matrix • A graphical description of the code consists of “bit nodes” and “parity check nodes”. An edge connects a bit node to a parity check node if that bit is involved in that parity equation • Decoding is done by passing messages along the lines of the graph • Iterative decoders use soft information as inputs and produce soft information as outputs (SISO) • ECC scheme should incorporate a PR channel detector to cope with ISI • Iterative decoding schemes use a SISO channel detector, e.g., a MAP (BCJR) decoder • A MAP decoder computes the a posteriori bit probability (APP) assuming an AWGN and given the • Channel model (trellis) • Noisy observations and noise variance • Prior soft information on the bits • Schemes of the following type were applied to • PR channels • Soft information is iterated between the channel • decoder and the ECC decoder • This is called “Turbo Equalization” Noise-Predictive Turbo Equalization Partial-Response Equalization • Procedure is similar to the memoryless channel case. There are 3 differences: • Obtaining Soft information: “Turbo Equalization” block replaces LDPC decoder • Making noise decisions: additional past bit decisions are required to determine a noise term • Iterating with the channel: updated noisy observations and corresponding variances are fed into the BCJR decoder. They are incorporated in the computation of updated branch metrics • Today’s digital magnetic recording devices employ a partial-response maximum likelihood (PRML) detection scheme in the readback process • A PRML system uses an equalizer to shape the channel response to a particular polynomial target, called a partial response (PR) polynomial • Equalizer is followed by a Viterbi detector (VD), matched to the target shape • Making Reliable Noise Decisions Outline of a single iteration • Perform a single BCJR pass followed by “T” LDPC iterations • Determine all reliable bits and make reliable bit decisions • Make noise decisions from available bit decisions • Estimate noise terms by linearly combining neighboring noise decisions • Subtract noise estimates from channel’s noisy observations • Feed new values and variances to BCJR for next iteration • Priors to BCJR remain the extrinsic information of the LDPC • Linear Noise Prediction Performance for PR4 and EPR4 Summary Noise Prediction and PRML Detection • Partial-response equalization leads to noise enhancement and coloration • We proposed a new iterative decoding scheme for PR channels that takes the noise coloration into account • Scheme uses a selective noise prediction process that is imbedded into the channel detector • Future work includes • Application to perpendicular recording channels • Incorporation of soft decisions • Feedback of bit decisions into LDPC and BCJR decoders • Assume a zero-forcing PR equalizer • Its output can be written as • Equalizer determines colored noise model and autocorrelation • Iterating with the Channel • Subtract new noise estimates from noisy observations • Updated noisy observations have lower noise power • Recompute likelihoods, given updated observations and updated variances. Input as new priors to LDPC • Modify VD’s branch metric computation for each state transition sj -> sk • Estimate past noise samples by subtracting past bit decisions from past outputs • Take past bit decisions from the survivor path associated with state sj • Assign past noise estimates in a predictor to estimate current noise term • Subtract current noise estimate from current equalizer output • Calculate branch metric with new value Acknowledgement.We would like to thank Joseph Soriaga and Panu Chaichanavong for their assistance in the implementation of this scheme.