Download
1 / 30
330 likes | 696 Views
X 1. X 2. 第一节 间接平差原理. 要求. 间接平差法(参数平差法) 是通过选定 t 个独立未知量作为参数,将每个观测值分别表达成这 t 个参数的函数,建立函数模型,按最小二乘原理,用求自由极值的方法解出参数的最或然值,从而求得各观测值的平差值。 先看一个确定三角形形状的例子: 令:. 平差值方程. 误差方程. 基础方程. 参数的解. 第一节 间接平差原理. 一般地:设有 n 个观测值 令: 则有:. 一、间接平差原理 设有 n 个观测值 ,必要观测个数为 t,

E N D
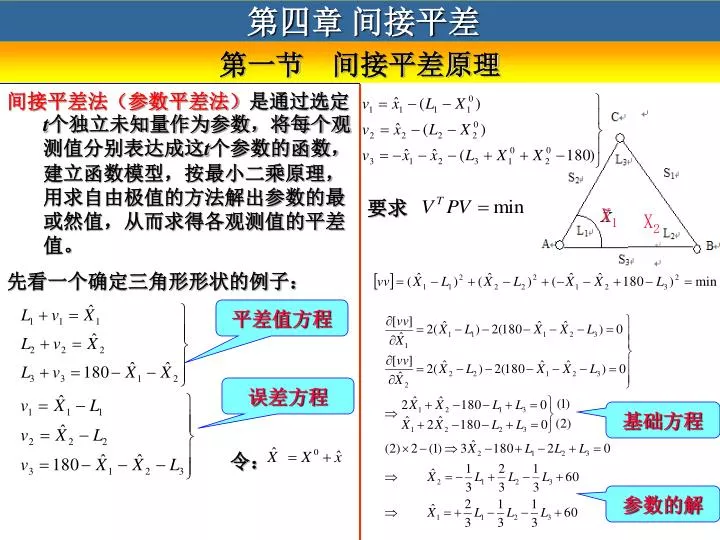
第四章 间接平差 X1 X2 第一节 间接平差原理 要求 间接平差法(参数平差法)是通过选定t个独立未知量作为参数,将每个观测值分别表达成这t个参数的函数,建立函数模型,按最小二乘原理,用求自由极值的方法解出参数的最或然值,从而求得各观测值的平差值。 先看一个确定三角形形状的例子: 令: 平差值方程 误差方程 基础方程 参数的解
第四章 间接平差 第一节 间接平差原理 一般地:设有n个观测值 令: 则有: 一、间接平差原理 设有n个观测值 ,必要观测个数为t, 选定t个独立参数 近似值取为 ,有 平差值方程为: 令: 观测值平差值
第四章 间接平差 第一节 间接平差原理 令: 则上式变为: 要求: 对自变量X求导,令一阶导数为0,即: 令: 则有: 将基础方程第一式代入第二式,得: 令: 则有: 法方程的解: 或 观测值和参数的平差值: 法方程 误差方程 P为对角阵 基础方程
第四章 间接平差 第一节 间接平差原理 二、计算步骤 1.确定t,选t个独立量为参数X. 2.列立误差方程 3.组成法方程 式中 4.解算法方程,求参数的改正数 或 5.求观测值改正数 6.求平差值 7.精度评定 (以后介绍)
第四章 间接平差 第一节 间接平差原理 三、例题(P104-106) 1.选取 、 两点高程平差值为未知参数 取其近似值: 定权:C=2 2.列立误差方程
第四章 间接平差 第一节 间接平差原理 3.组成法方程 4.解算法方程 5.求改正数 6.求平差值 观测值平差值 参数平差值
第四章 间接平差 第二节 误差方程的列立 一、参数个数的确定 参数的个数等于必要观测个数。 水准网:有已知点:等于待定点个数。 无已知点:待定点数减1。 测角网:有四个必要的起算数据,等于2倍待定点数。 少于四个必要起算数据,等于2倍总点数减4。 测边网、边角网、导线网:有四个必要的起算数据,等于2倍待定点数。 少于四个必要起算数据,等于2倍总点数减3。 二、参数的选取 可以选直接观测值的平差值,也可以选非直接观测量的平差值,甚至二者兼而有之。要保证参数独立。 水准网一般选待定点高程平差值; 三角网和导线网选待定点坐标平差值。 三、误差方程的列立 方法:把观测值表示成所选参数的函数 水准网和GPS网一般是线性的,三角网和导线网一般为非线性的。如图测角网,选D点坐标平差值为参数:
第四章 间接平差 第二节 误差方程的列立 再如下图的测边网: 以上均为非线性形式,需要线性化。 二、参数的选取 可以选直接观测值的平差值,也可以选非直接观测量的平差值,甚至二者兼而有之。要保证参数独立。 水准网一般选待定点高程平差值; 三角网和导线网选待定点坐标平差值。 三、误差方程的列立 方法:把观测值表示成所选参数的函数 水准网和GPS网一般是线性的,三角网和导线网一般为非线性的。如图测角网,选D点坐标平差值为参数:
第四章 间接平差 第二节 误差方程的列立 四、误差方程的线性化 一般方法:按泰勒公式展开: 展开: 下面结合测角网和测边网,介绍其误差方程的线性化问题,并从中找出线性化的规律。 1.测角网坐标平差的误差方程 下面先求坐标改正数与方位角改正数之间的关系 ,,…, 坐标方位角改正数
第四章 间接平差 第二节 误差方程的列立 四、误差方程的线性化 1.测角网坐标平差的误差方程 而: 代入上式得: 同理得:
第四章 间接平差 第二节 误差方程的列立 四、误差方程的线性化 1.测角网坐标平差的误差方程 角度误差方程: 考虑到: 代入并令: 注意四种特殊情况公式的变化 见P110 坐标方位角改正数方程 将坐标方位角改正数方程代入即可,见P111
第四章 间接平差 第二节 误差方程的列立 四、误差方程的线性化 1.测角网坐标平差的误差方程 提示: 列立步骤: 1.计算网中各待定点近似坐标; 2.计算各边的近似边长和近似坐标方位角; 3.列出各边坐标方位角改正数方程,计算系数; 4.列出角度误差方程. 记忆规律
第四章 间接平差 第二节 误差方程的列立 四、误差方程的线性化 1.测边网坐标平差的误差方程 提示:按J-K方向与按K-J方向列立的方程相同 [例4-3] 见教材 P113-116 导线网是上述两种情况的综合,此时要注意观测值权的确定. 注意:四种特殊情况 记忆规律
第四章 间接平差 第二节 误差方程的列立
第四章 间接平差 第三节 精度评定 二、协因数阵 已知 求: 基本思想: 把这些向量表示成已知协因数阵的量L 的线性函数,然后用协因数传播律求解。 具体表示方法要用到平差原理中的主要 公式。 一、单位权中误差 其中: 顾及 则 而
第四章 间接平差 第三节 精度评定 要想找 ,要么把 化为 的 函数,要么先求如下协因数阵: 则: 二、协因数阵 因: 所以: 其中: 根据协因数传播律: 则 而
第四章 间接平差 第三节 精度评定 其实只需全微分即可: 参数函数: 全微分: 令 则有: 令: 协因数: 中误差: 三、参数函数的中误差 设参数函数 按泰勒公式展开 顾及 则 而 令: 权函数式
第四章 间接平差 第三节 精度评定 [例题]参阅教材 P120-122 四、参数的中误差 参数的协因数阵: 对角线元素就是各参数的协因数,有: 参数的中误差: 权系数阵
第四章 间接平差 第三节 精度评定
第四章 间接平差 第四节 公式汇编 法方程的解: 平差值: 单位权中误差: 参数协因数阵: 参数中误差: 观测值个数n,必要观测个数t,选t独 立量为参数 近似值取: 有: 平差值方程: 误差方程: 常数项: 或 法方程: 式中:
第四章 间接平差 第四节 公式汇编 * 参数函数: 权函数式: 式中: 其中: 函数协因数: 函数方差:
第四章 间接平差 第五节 附有限制条件的间接平差 二、协因数阵 除了要列立18个误差方程外,还要列出 这2个参数之间的条件式。 简 介 间接平差要求选u=t个独立的参数,但 有时所选参数的个数会大于t , 即:u>t 如图测角网,n=18 ,又高精度观测了 P1~P2的边长和P3~P4边的方位角,则 t= 2X5-2=8 , 但在平差时,一般仍然选择各待定点的 坐标平差值为参数,即: u=10>t 多选2个参数,在参数之间就会产生2个 条件式:
第四章 间接平差 第五节 附有限制条件的间接平差 根据第二章知,线性化后有: 要求满足: 组成新函数: 求一阶导数并令其为零: 转置后: 此式与函数模型一起称为“基础方程” 一、平差原理 设有n个观测值 L,权阵为 P ,必要观 测个数为t , 选取u>t个参数 X ,则不独 立参数的个数为: s=u-t 方程总数为:r+u=r+t+s=n+s (个)。 其中包含 n 个误差方程和 s 参数之间的 条件方程。一般形式为: 或 函数模型
第四章 间接平差 第五节 附有限制条件的间接平差 法方程解法一(显性形式): 用 左乘(4)-(5)得: 令: 则: 所以: 代如(4): 代入(1) (1) 基础方程 (2) (3) (1)代入(3)上式变为: 令: (4) (5) 参数改正数 改正数 法方程
第四章 间接平差 第五节 附有限制条件的间接平差 代入误差方程求观测值改正数: 求平差值: 解法二(矩阵形式) 由前知 (4) (5) 上面法方程可写成如下形式: 法方程的解: 法方程
第四章 间接平差 第五节 附有限制条件的间接平差 基础方程为: 二、精度评定 1.单位权中误差 其中: r+u = n+s
第四章 间接平差 第五节 附有限制条件的间接平差 二、精度评定 2. 协因数阵 基本思想是把其它变量表示为已知协因数阵的量的线性函数。
第四章 间接平差 第五节 附有限制条件的间接平差 其中: 如何求参数的中误差??? 三、公式汇编及示例 1.公式汇编 函数模型: 法方程: 式中: 二、精度评定 3. 参数函数的协因数
第四章 间接平差 第五节 附有限制条件的间接平差 根据第二章知,线性化后有: 参数的函数: 权函数式: 式中: 函数的协因数: 函数的中误差: 如果要求参数X的中误差,直接从Qxx中 抄其协因数,开方后乘单位权中误差。 三、公式汇编(续) 参数的解: 式中 平差值 单位权中误差:
第四章 间接平差 第五节 附有限制条件的间接平差 n = 18 t=2*5-2=8 u=2*5=10 限制条件方程个数: s = u–t =2 方程总数 C= r+u = n+s = 20 误差方程数:n = 18 = c-s 详见课本 P129-133 第六节 间接平差估值的统计性质 (知道结果即可,自学) 三、公式汇编(续) 2.示例
