Download
1 / 1
10 likes | 72 Views
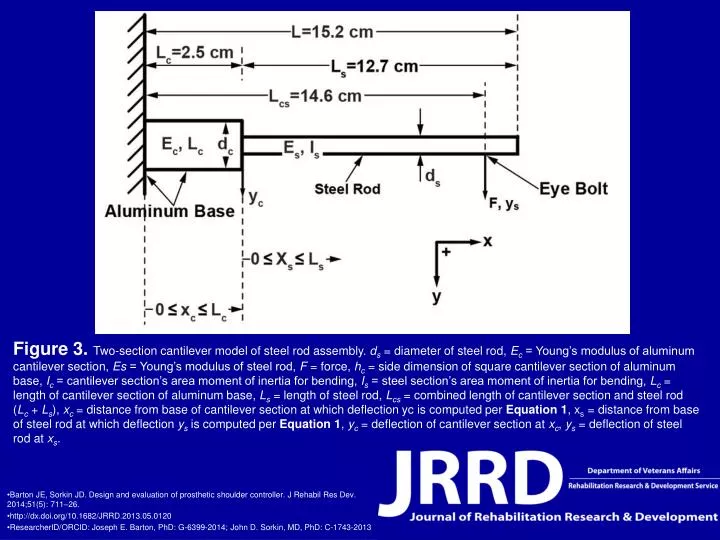
Explore the design and evaluation of a prosthetic shoulder controller using a two-section cantilever model of a steel rod assembly. This study includes the parameters and equations for bending deflections of the aluminum cantilever section and steel rod.

E N D
Figure 3. Two-section cantilever model of steel rod assembly. ds = diameter of steel rod, Ec = Young’s modulus of aluminum cantilever section, Es = Young’s modulus of steel rod, F = force, hc = side dimension of square cantilever section of aluminum base, Ic = cantilever section’s area moment of inertia for bending, Is = steel section’s area moment of inertia for bending, Lc = length of cantilever section of aluminum base, Ls = length of steel rod, Lcs = combined length of cantilever section and steel rod (Lc + Ls), xc = distance from base of cantilever section at which deflection yc is computed per Equation 1, xs = distance from base of steel rod at which deflection ys is computed per Equation 1, yc = deflection of cantilever section at xc, ys = deflection of steel rod at xs. • Barton JE, Sorkin JD. Design and evaluation of prosthetic shoulder controller. J Rehabil Res Dev. 2014;51(5): 711–26. • http://dx.doi.org/10.1682/JRRD.2013.05.0120 • ResearcherID/ORCID: Joseph E. Barton, PhD: G-6399-2014; John D. Sorkin, MD, PhD: C-1743-2013
