Download
1 / 66
660 likes | 788 Views
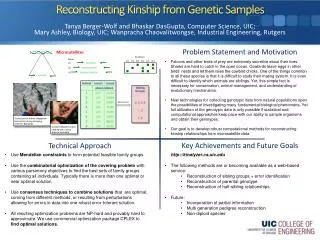
Reconstructing Building Interiors from Images. Yasutaka Furukawa Brian Curless Steven M. Seitz University of Washington, Seattle, USA 2011/01/16 蔡禹婷. Outline. Introduction Goal Challenges System pipeline Algorithmic details (technical contribution) Experimental Results

E N D
Reconstructing Building Interiors from Images Yasutaka Furukawa Brian Curless Steven M. Seitz University of Washington, Seattle, USA 2011/01/16 蔡禹婷
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
Reconstruction and Visualization of Architectural Scenes • Semi-automatic(Manual ) • Google Earth & Virtual Earth • Façade : Building facade made for use as a real-time video game engine environment. • Automatic • Ground-level images • Aerial images: A projected image which is "floating in air", and cannot be viewed normally. Aerial images Google Earth 4 Virtual Earth
Reconstruction and Visualization of Architectural Scenes • Difficulty • Little attention paid to indoor scenes • If you walk inside your home and take photographs, generating a compelling 3D reconstruction and visualization becomes much more difficult. ? ? Google Earth 4 Virtual Earth ? ? Aerial images
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
Goal • Fully automatic system for interiors / outdoors • Reconstructs a simple 3D model from images • Provides real-time interactive visualization
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
Challenges • Reconstruction • Multi-view stereo (MVS) typically produces a dense model • We want the model to be • Simple for real-time interactive visualization of a large scene (e.g., a whole house) • Accurate for high-quality image-based rendering • Simple mode is effective for compelling visualization
Challenges • Indoor Reconstruction Texture-poor surfaces Complicated visibility Prevalence of thin structures (doors, walls, tables)
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
System pipeline • 3D reconstruction and visualization system for architectural scenes.
System pipeline • Image-based • SFM • MVS • MWS • Merging
System pipeline Image-based Image-based SFM MVS MWS Merging Image-based
System pipeline Image-based SFM MVS MWS Merging Structure-from-Motion Bundler by Noah Snavely Structure from Motion for unordered image collections WEB: http://phototour.cs.washington.edu/bundler/
System pipeline Image-based SFM MVS MWS Merging Multi-view Stereo PMVS by Yasutaka Furukawa and Jean Ponce Patch-based Multi-View Stereo Software/
System pipeline Image-based SFM MVS MWS Merging Manhattan-world Stereo
System pipeline Image-based SFM MVS Manhattan-world Stereo
System pipeline Image-based SFM MVS MWS Merging Manhattan-world Stereo Result
System pipeline Image-based SFM MVS MWS Merging Axis-aligned depth map merging (Paper contribution)
Outline • Introduction • Goal • Challenges • System pipeline • Algorithmic details (technical contribution) • Experimental Results • Conclusion and future work • Reference
Axis-aligned Depth-map Merging • Basic framework is similar to volumetric MRF
Axis-aligned Depth-map Merging • Basic framework is similar to volumetric MRF
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & data
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & dataUnary is often constant (inflation)
Key Feature 1 - Penalty terms • Weak regularization at interesting places • Focus on a dense model Binary penalty Binary encodes smoothness & dataUnary is often constant (inflation)
Key Feature 1 - Penalty terms • Weak regularization at interesting places • Focus on a dense model • We want a simple model Binary penalty Binary encodes smoothness & dataUnary is often constant (inflation)
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & data Unary is often constant (inflation)
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & data Unary is often constant (inflation)
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & data Unary is often constant (inflation) Unary encodes data
Key Feature 1 - Penalty terms Binary penalty Binary encodes smoothness & data Unary is often constant (inflation) Binary is smoothness Unary encodes data
Key Feature 1 - Penalty terms Binary penalty Regularization becomes weakDense 3D model Regularization is data-independent Simpler 3D model
Axis-aligned Depth-map Merging • Align-voxel grid withthe dominant axes
Axis-aligned Depth-map Merging • Align-voxel grid withthe dominant axes • Data term (unary)
Axis-aligned Depth-map Merging • Align voxel grid withthe dominant axes • Data term (unary)
Axis-aligned Depth-map Merging • Align voxel grid withthe dominant axes • Data term (unary)
Axis-aligned Depth-map Merging • Align voxel grid withthe dominant axes • Data term (unary) • Smoothness (binary)
Axis-aligned Depth-map Merging • Align voxel grid withthe dominant axes • Data term (unary) • Smoothness (binary)
Axis-aligned Depth-map Merging • Align voxel grid withthe dominant axes • Data term (unary) • Smoothness (binary) • Graph-cuts
Key Feature 2 – Regularization • For large scenes, data info are not complete • Typical volumetric MRFs bias to general minimal surface • We bias to piece-wise planar axis-aligned for architectural scenes
Key Feature 2 – Regularization Same energy (ambiguous)
Key Feature 2 – Regularization Same energy (ambiguous) Data penalty: 0
Key Feature 2 – Regularization Same energy (ambiguous) Data penalty: 0 Smoothness penalty: Data penalty: 0 Smoothness penalty: 24 Data penalty: 0
Key Feature 2 – Regularization shrinkage