Download
1 / 27
270 likes | 466 Views
Chapter 5. Discrete-Time Process Models. Homework 8. (a) Find the discrete-time transfer functions of the following continuous-time transfer function, for T s = 0.25 s and T s = 1 s. Use the Forward Difference Approximation.

E N D
Chapter 5 Discrete-Time Process Models Homework 8 (a) Find the discrete-time transfer functions of the following continuous-time transfer function, for Ts = 0.25 s and Ts = 1 s. Use the Forward Difference Approximation (b) Calculate the step response of both discrete transfer functions for 0 ≤ t ≤ 5 s. (c) Compare the step response of both transfer functions with the step response of the continuous-time transfer function G(s) in one plot/scope for 0 ≤ t ≤ 0.5 s.
Chapter 5 Discrete-Time Process Models Solution to Homework 8 (a)
Chapter 5 Discrete-Time Process Models Solution to Homework 8
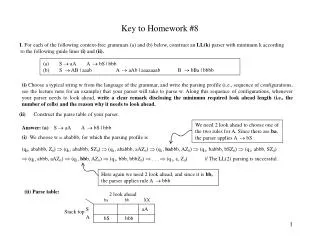
Chapter 5 Discrete-Time Process Models Solution to Homework 8 (b) The step response of both transfer functions for 0 ≤ t ≤ 5 s. Using the following command in Matlab workspace: Y1 = dlsim([0.625],[1 –1.5 1.125],ones(1,21)) Y1 = [0 0 0.6250 1.5625 2.2656 2.2656 1.4746 0.2881 –0.6018 –0.6018 0.3993 1.9010 3.0273 3.0273 1.7602 –0.1403 –1.5658 –1.5658 0.0378 2.4433 4.2473] Using the following command in Matlab workspace: Y2 = dlsim([10],[1 0 9],ones(1,6)) Y2 = [ 0 0 10 10 –80 –80 ]
Chapter 5 Discrete-Time Process Models Solution to Homework 8 (c) Comparing the step responses Ts = 0.25 s Ts = 1 s • FDA delivers bad results • Possible solutions can be the use of smaller sampling time Ts or the use of ZOH or TA
Chapter 5 Discrete-Time Process Models Solution to Homework 8 • FDA with smaller sampling time Ts
Chapter 5 Discrete-Time Process Models Solution to Homework 8 • Using TA or ZOH, with reasonably large sampling time Ts
System Modeling and Identification Chapter 6 Process Identification
Chapter 6 Process Identification Process Identification • Industry processes can be modeled in various ways, such as in state-space description or in transfer functions. • The models mostly used for control purposes are in form of linear differential or difference equations, with parameters assumed as known and constant. • In real conditions, it is often necessary to measure or estimate these parameters from input and output signals of the process. • This case is referred to as parameter estimation or process identification.
Chapter 6 Process Identification Process Identification • The objective of process identification is to find a model that can describe the process. • The information provided to do that is the inputs and the outputs of the process. independent, arbitrary, measurable, known dependent, measurable, known • The ideal result of a process identification will be:
Chapter 6 Process Identification Identification Procedure • A general procedure in process identification includes: • Determination of model structure → Based on mathematical origin or artificial intelligence • Estimation of model parameter • → Based on the chosen model structure • Model verification → A model must be able to produce accurate output if “unseen” input data is given to it
Chapter 6 Process Identification Classification of Identification Methods • Based on input signals • Natural, generated during the process and measured • Artificial, generated especially for the identification purpose • Based on mathematics point of view • Deterministic, assuming exact knowledge about process outputs, inputs, disturbance, etc, and do not consider random sources and influences • Stochastic, assuming some properties and some knowledge of random disturbances, statistical approach • Based on data processing • Batch method, one calculation using the whole data at once, off-line • Recursive method, gradual use of data, estimated parameters are improved from each experiment, can be on-line or off-line
Chapter 6 Process Identification Identification from Step Response • The methods in this category aim to provide first estimate of the process and provide approximate information about the process gain, dominant time constant, and time delay. • The input signal used to excite the process is a step change of the process input. • It is necessary that the process is in a steady-state before the step change occurs. • The measured step response needs to be normalized for unit step change and zero initial conditions.
Chapter 6 Identification from Step Response “First Order + Time Delay” Approximation • The approximation model for the identified process is given in s-Domain as: where K is the process gain, τ denotes time constant, and Td is the time delay. • The step response of the transfer function G(s) given above in time domain is:
Chapter 6 Identification from Step Response “First Order + Time Delay” Approximation Unit step response Approximation of unit step responseFirst order + time delay • If the step response is a normalized one, the process gain K is equal to the new steady-state output, K = y(∞). • The actual unit step response and its approximation will always have two crossing points. • Time constant τ and time delay Td can be calculated if the two crossing points are already chosen. • The two crossing points should be chosen thoughtfully, to avoid large difference between the two step responses.
Chapter 6 Identification from Step Response “First Order + Time Delay” Approximation Unit step response Approximation of unit step responseFirst order + time delay • From two freely-chosen points (t1,y1) and (t2,y2), after some manipulations, we can also obtain τ and Td through calculations as follows:
Chapter 6 Identification from Step Response “First Order + Time Delay” Approximation • Advantage: • Easy calculation, straightforward after two points are chosen • Disadvantage: • Low accuracy, the higher the process order, the lower the accuracy of the model • Time delay will always present in the model
Chapter 6 Identification from Step Response Time-Percent Value Method • The approximation model for the identified process is given in s-Domain as: • From the unit step response, empirical values h∞, t10, t30, t50, t70, and t90 are obtained. Step response
Chapter 6 Identification from Step Response Time-Percent Value Method • The values of parameters K, τ, and n are determined as follows: • K is obtained from the steady-state value of the step response of the process divided by the magnitude of the input step. • Using the “t/t Table”, up to 6 points of ti/tj can be located → the model order n can be determined. • Using the “t/τ Table”, up to 5 points of ti/τ for the previously determined model order n can be located → the time constant τ can be determined.
Chapter 6 Identification from Step Response Time-Percent Value Method t/t Table t/τ Table
Chapter 6 Identification from Step Response Example: Time-Percent Value Method A step function u(t) = 3(t) is fed in a process. As the step response, the following graph is obtained. Determine the approximate transfer function of the process by using the Time-Percent Value Method.
Chapter 6 Identification from Step Response Example: Time-Percent Value Method
Chapter 6 Identification from Step Response Example: Time-Percent Value Method From 6 ti/tj points, the most representative order for the model is 5 t/t Table
Chapter 6 Identification from Step Response Example: Time-Percent Value Method 5 values of ti/τ can be located for n = 5 Result: t/τ Table
Chapter 6 Identification from Step Response Homework 9 • Time Percent Value MethodDetermine the approximation of the model in the last example, if after examining the t/t table, the model order is chosen to be 4 instead of 5.
Chapter 6 Identification from Step Response Homework 9A • “First Order + Time Delay” ApproximationDetermine the approximation of the model in the last example, using the data from t1= 2*(last 2 digits of Student ID), t2= arbitrary. • Perform calculations to get your model. • Print the graph (Slide 9/22) and draw the response of your model on it.