Download
1 / 19
191 likes | 311 Views
Le Bus CAN. Raisons et Intérêts du Bus CAN. Depuis les années 1960 la longueur de câble utilisée dans l’automobile ne cesse de croître pour dépasser 2000 m en 1995. Le nombre des connexions atteint 1800 à cette même date. La fiabilité et la sécurité sont menacés.

E N D
Le Bus CAN E. DERENDINGER
Raisons et Intérêts du Bus CAN Depuis les années 1960 la longueur de câble utilisée dans l’automobile ne cesse de croître pour dépasser 2000 m en 1995. Le nombre des connexions atteint 1800 à cette même date. La fiabilité et la sécurité sont menacés. Les normes en matière de pollution et de consommation d’énergie obligent les constructeurs à multiplier les capteurs et actionneurs intelligents dans leur véhicules accélérant ce processus de multiplication des câbles et connexion depuis une vingtaine d ’années. Le besoin de sécurité accrue (ABS, ESP, AIR-BAG…) et la demande de confort (mémorisation des réglages de conduite, climatisation régulée par passager, système de navigation…) ne font que renforcer cette tendance. La société BOSCH développe dès le début des années 1980 une solution de multiplexage des informations circulant à bord de la voiture. Le bus CAN apparaîtra et sera normalisé dans les années qui suivent (dès 1983). Les composants CAN se démocratisent et investissent d’autres secteurs de l’industrie (moissoneuses, pelleteuse, médical, produits numériques, systèmes electrotechnique…). E. DERENDINGER
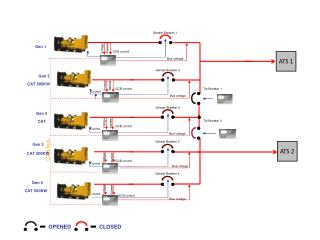
Applications du bus CAN CAN E. DERENDINGER
Topologie du bus CAN Câblage traditionnel Simple& Léger CAN 2 câbles pour l’alimentation électrique 12 V DC 1 paire torsadée pour les transferts d’informations E. DERENDINGER
Topologie du bus CAN • Avantages • Configuration simple • Câblage réduit • Ordre des nœuds indifférent • Désavantages • L’ensemble des nœuds est affecté en cas de défaut • Une défaillance est plus délicate à diagnostiquer • Outils de diagnostique et de maintenance spécialisés Nœud 1 Nœud 2 CAN_H Bus CAN CAN_L Nœud 3 Nœud 4 Nœud 1 Nœud 3 Nœud 11 CAN_H Bus CAN CAN_L Nœud 4 Nœud 7 Nœud 21 E. DERENDINGER
Topologie du bus CAN Câbles électriques, fibres optiques, Liaisons infrarouges, liaison hertziennes Support de transmission Norme CAN ISO 11898 Haute vitesse ISO 11519 Basse vitesse Niveaux des signaux : hauteur et largeur des bits portant l’information Codage de l ’information amplitude, timing, synchro Codage des messages arbitrage, gestion erreurs Protocole de transmission Définition d’un langage entre les composant CAN Applications constructeurs E. DERENDINGER
Nœud 1 Nœud n Nœud 1 Nœud n 2.2K CAN_H CAN_H 3.25V 120 120 2.2K 1.75V CAN_L CAN_L 5 CAN_H 5 CAN_H 4 4 3 3 2 2 1 CAN_L 1 CAN_L Domminant Recessif Dominant Dominant Recessif Dominant Bus CAN : codage de l’information ISO11898 : High Speed CAN 125Kbps - 1Mbps ISO11519-2 : Low Speed CAN Fault Tolerant -125Kbps VCAN_H > VCAN_L + 0,5 V => 1 logique (récessif) VCAN_H < VCAN_L + 0,5 V => 0 logique (dominant) E. DERENDINGER
Bus CAN : codage de l’information ISO11898 : High Speed CAN 25O Kbps 1bit = 4µs 1 bit correspond à 32 coup d’horloge La lecture du bit devra être faite au 20éme coup d’horloge Synch Propagation Phase1 Phase2 32 time quantum Bit valide Quantum = 4 µs/32 = 125 ns -> Fhorloge= 1/125 10-9 = 8 Mhz E. DERENDINGER
4µs 4µs 2 à 3 V Bit de début de message état dominant pendant 1bit Bits d’arbitration du bus CAN et d’identification du message (11 bits) Bit dominant pour un envoi de données Bit récessif pour une demande de données 2 bits réservés + 4 bits spécifiant la longeur du champ de données (compris entre 0 et 8) 0 à 8 octets de données soit 0 à 64 bits Bus CAN : codage des messages CAN 2.0 A Le bus CAN est libre : état récéssif depuis au moins 10 bits consécutifs E. DERENDINGER Les mots sont emis en commençant par le poids fort
Bus CAN : codage des messages Aquisition d’une trame avec un oscilloscope de terrain CAN 2.0 A E. DERENDINGER
Entre deux messages 3 bits récéssifs au minimum Bits de contrôle de transmission des données (15 bits de CRC + 1 délimiteur) Bit d’accusé de réception l’emmetteur envoi un récessif qui doit être écrasé par le dominant du nœud ayant interprété le message Bit délimiteur de réception Fin de message : état récéssif de 7 bits consécutifs Bus CAN : codage des messages CAN 2.0 A 0 à 8 octets de données soit 0 à 64 bits E. DERENDINGER Les donnée sont emises dans l’ordre 1ere, 2nd, 3eme etc
0 1 1 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 0 1 1 1 0 1 0 0 0 1 0 1 1 1 1 IDENTIFIANT NOMBRE DONNEE N°1 DONNEE N°2 Bit de début de message 2nd bit réservé NON UTILISE Bit dominant pour un envoi de données 1er bit réservé IDENTIFIANT COURT (11 bits) Bus CAN : codage des messages Exemple envoi de 5 données sans synchronisation (stuffing) et sans arbitrage CAN 2.0 A 4µs 1 1 38D 5 3A 2F E. DERENDINGER CALCULATRICE
Bus CAN : codage des messages Exemple envoi de 5 données sans synchronisation (stuffing) et sans arbitrage CAN 2.0 A 0 0 1 1 1 0 1 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 0 1 1 1 0 1 0 0 0 1 0 1 DONNEE N°5 CHAMP DE VERIFICATION CRC Fin de message : état récéssif de 7 bits consécutifs + délais inter-trame de 3 bits minimum 3A Bit d’accusé de réception Bit délimiteur de réception Délimiteur du champ de CRC E. DERENDINGER CALCULATRICE
Bus CAN : codage des messages Exemple d’arbitrage CAN 2.0 A Deux emetteurs (nœud n°1 et nœud n°2) prennent le bus au même moment. Le premier présentant un bit récessif sur le bus devra laisser le bus à l’autre. Dans l’exemple ci-contre le nœud n°2 laisse le bus au nœud n°1 au 5ème bit car il voit qu’il n’y a pas coïncidence entre ce qu’il emmet et ce qu’il lit sur le bus. Il en déduit qu’un emetteur plus prioritaire est aussi sur le bus et cesse d’émettre immédiatement. Il continue tout de même à lire le message et, dès que le bus sera libre il fera une nouvelle tentative d’émission. 1 1 0 0 1 1 1 0 0 0 1 1 0 1 EMETTEUR NŒUD N°1 1 1 0 0 1 1 1 0 0 0 1 1 0 1 RECEPTEUR 1 1 0 0 1 1 1 1 0 0 1 1 0 1 EMETTEUR NŒUD N°2 1 1 0 0 1 1 1 0 0 0 1 1 0 1 RECEPTEUR E. DERENDINGER
Bus CAN : codage des messages Ajout d’un bit de synchronisation ``stuffing’’ CAN 2.0 A 4µs 1 1 0 1 1 1 0 0 0 0 0 S 0 1 0 0 0 0 0 S 1 1 1 1 S 1 1 1 1 1 S 1 1 1 IDENTIFIANT NOMBRE DONNEE N°1 FF 38D 3 Lorsque 5 bits consécutifs sont au même état logique l’émetteur ajoute 1 bit de resynchronisation que les recepteurs ne prendront pas en considération. Ce bit de “stuffing”en noirprend l’état opposé aux 5 bits qui le précédent. E. DERENDINGER CALCULATRICE
Bus CAN : outilsd’investigation B.S.I. testeur Outil : Diag 2000 de PSA Analyseur de protocole Outil : CVX 200 ou MUXTESTER CAN Bus Traceur de données Outil : MUXTRACE ou CANalyser + Carte CAN Oscilloscope numérique Outil : CANscope ou CAN bus signal analyser E. DERENDINGER
Bus CAN : analyseur de protocole Analyse de l’état du bus avec un outil de terrain Node n Max. 30 ANALYSEUR Protocole Node 1 CAN_H 120 120 CAN_L E. DERENDINGER
Bus CAN : traceur de données Observation des échanges sur le bus avec une carte spécialisée Node n Max. 30 Node 1 TRACEUR CAN_H 120 120 CAN_L E. DERENDINGER
Bus CAN : oscilloscope numérique Observation des signaux et des échanges sur le bus Node n Max. 30 Node 1 CAN_H 120 120 CAN_L Dominant : Low level 0 Recessive : High level 1 - + Differential probe Mesure des tensions différentielles E. DERENDINGER