Download
1 / 26
260 likes | 282 Views
This paper explores set-based parameter estimation for biological models, focusing on example models like conversion reaction and internalization. Implementation aspects, performance analysis, and handling model size are detailed. By converting ODEs to discrete formulations and adding artificial data to simulate steady states, the study aims to reduce time spent on optimization while achieving absolute certainty in results. The methodology is compared to existing tools, showing potential implications and advantages in prediction accuracy. Despite facing numerical challenges from large parameter spaces, the approach proves useful in confirming previous conclusions on model rejection. This research highlights the significance of discretization, performance analysis, and the trade-offs between resolution and computational cost in real biological examples.

E N D
Pelle Lundberg Model rejections using set-based parameter estimation for real biological examples
Outline Introduction The example models Implementation aspects Results Performance analysis Model size Size of parameter space Discretization Summary
Introduction How does this method fit in to our existing methods? Model rejection Core prediction • Possible implications • Conclusions with absolute certainty • Reduced time spent on optimisation • Hence, we want to try this on our examples!
Examples used Conversion reaction model Earlier rejected based on overshoot behaviour Phosphorylated IR
Examples used Internalization model Earlier rejected based amount of internalised IR Phosforylated IR Percent of Internalized IR
Examples used Internalization model Earlier rejected based amount of internalised IR Phosforylated IR Percent of Internalized IR
Implementation issues Output function y = k*IRp • From ODE to discrete formulation • Conclusions are drawn from discrete model • Additional time points are added with artificial data • Steady state description • yss = x3ss / xtot • Add to measurement data: xss3 = x3(10) • Add additional constraint: f3(x3ss) = 0
Implementation issues Output function y = k*IRp • From ODE to discrete formulation • Conclusions are drawn from discrete model • Additional time points are added with artificial data Not present in current toolbox • Steady state description • yss = x3ss / xtot • Add to measurement data: xss3 = x3(10) • Add additional constraint: f3(x3ss) = 0
Implementation issues Output function y = k*IRp • From ODE to discrete formulation • Conclusions are drawn from discrete model • Additional time points are added with artificial data Not present in current toolbox • Steady state description • yss = x3ss / xtot • Add to measurement data: xss3 = x3(10) • Add additional constraint: f3(x3ss) = 0 Requires additional time steps Implies higher order terms
Results Conversion reaction model Earlier rejected based on overshoot behaviour Phosforylated IR
Results Conversion reaction model Earlier rejected based on overshoot behaviour Rejected Phosforylated IR
Results Internalisation model Earlier rejected based amount of internalised IR Phosforylated IR Percent of internalized IR
Results Internalisation model Earlier rejected based amount of internalised IR Phosforylated IR Rejected Percent of internalized IR
Results • These results corresponds to earlier conclusions made using global optimisation
Results • These results corresponds to earlier conclusions made using global optimisation However... • There are still uncertainty in these results.
Uncertainty due to discretization The stiffness of the problem makes discretization troublesome A result of the large parameter interval Previously: (1-100) Currently used: (1e-6 - 1e6)
Uncertainty due to discretization The stiffness of the problem makes discretization troublesome A result of the large parameter interval Previously: (1-100) Currently used: (1e-6 - 1e6) • Implicit methods such as Backward Euler and Trapeziod method are used Euler forward Trapeziod method
Uncertainty due to discretization • Added time points for increased time resolution can not compensate enough Low time point resolution High time point resolution Titlar + större axlar
Uncertainty due to numerical problems Solving the convex problem Reformulation of feasibility problem • SeDuMi, SDPA • Numerical problems • Caused by the large parameter space
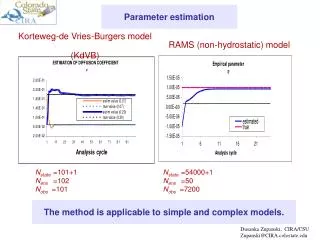
Performance analysis • A small performance analysis to asses the impact on computational cost from the following factors: • Number of states • Number of time points • Number of parameters • Size of the parameter space • Number of bisections
Performance analysis Formulation time [s] Size of xi (number of monomials)
Performance analysis Construction time [s] 7 hours 14 states, 14 parameters, 12 time points Size of xi (All monomials)
Summary We have tried Hasenauer's promising approach on some of our real examples His approach confirmed (i.e. proved) the previous conclusions However, even though we tested our smallest examples, significant problems appeared, since Our parameter spaces are much larger This gives numerical difficulties when solving the convex problem Discretization is an issue, especially in extreme regions of the parameter space • We also did a simple performance analysis • Discretization points (time points) is limiting the problem formulation • Large parameter spaces limits the maximal number of parameters