Download
1 / 64
670 likes | 882 Views
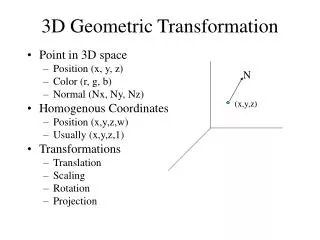
Detection of 3D Geometric Distortion in MRI. Supervisor PMS: Marcel Breeuwer marcel.Breeuwer@philips.com Supervisor TU/e: Bart ter Haar Romeny B.M.terhaarRomeny@tue.nl. F.G.C.M.v.d. Heuvel s446087 F.G.C.M.v.d.Heuvel@student.tue.nl. A local estimation method. Contents. Geometric Distortion

E N D
Detection of 3D Geometric Distortion in MRI Supervisor PMS:Marcel Breeuwermarcel.Breeuwer@philips.com Supervisor TU/e:Bart ter Haar RomenyB.M.terhaarRomeny@tue.nl F.G.C.M.v.d. Heuvels446087F.G.C.M.v.d.Heuvel@student.tue.nl A local estimation method
Contents • Geometric Distortion • State of the art • Local Estimation • Mathematics • Software • Validation • Discussion • Conclusions • Future
Geometric Distortion 1/5 Geometric Distortion Overview: • What is geometric distortion ? • Types • Causes • Consequences
Geometric Distortion 2/5 What is Geometric Distortion? • Change of position of anatomical structures • Shape change of entire image (global) • Shape change of parts of image (local) • Characteristic for type of scanner • MRI • CT
Geometric Distortion 3/5 Types of Geometric Distortion • Expressed as (combinations of) polynomial transformations: • 1th order: • Rigid translation, rotation • Affine shear, scaling (, mirror) • 2th and higher order: • Elastic • Both global and/or local
Geometric Distortion 4/5 Causes • Field-in-homogeneity • Especially for fast scan protocols • Patient induced field changes • Watery environment in body plus ionic substances Eddy current influence on the field
Geometric Distortion 5/5 Consequences • Appearance of structure different from reality • Size • Shape • Intensity • May lead to wrong diagnosis / therapy
How to solve the problem • State of the art: • Creating completely known phantom object • Finding transformation from un deformed data set to deformed data set • Estimating polynomial parameters for entire dataset Global estimation • But : • local and sharp deformation not detected correctly • Therefore new approach: • Estimating polynomial parameters for parts of data set • Local estimation
State of the art 1/13 State of the artOverview: • Phantom Objects • Estimation method • Correction method • Advantages, Problems & restrictions
State of the art 2/13 Phantom Objects • Number of reference structures with exactly known size and location • MR phantom • CT phantom
State of the art 3/13 Phantom Objects • MR Phantom for body coil • For MR higher order polynomial more complex structure future
State of the art 4/13 Phantom Objects • CT Phantom • Only up to affine transformation simple structure
State of the art 5/13 Phantom Objects Synthetically generated phantom scan Breeuwer, Holden, Zylka, Proceedings SPIE Medical Imaging, February 2001, San Diego, USA
State of the art 6/13 Estimation method • Deformation expressed as nth order polynomial transformation • Finding transformation for entire dataset Estimating polynomial parameters
State of the art 7/13 Estimation method • Mathematically expressed as polynomial transformation: with:
State of the art 8/13 Estimation method • Transformations exists of or as combinations of : • Rigid: • Translation • rotation • Affine: • Scaling • Shear • Elastic: 2th and higher order transformation matrices
State of the art 9/13 Estimation method • Combine all in system of equations:
State of the art 10/13 Estimation method • Estimating parameters t and a’s using SVD [alg. From Num Rec in C] • Will be explained later on…
State of the art 11/13 Estimation method • Schematic representation of estimation and correction procedure
F(x) State of the art 12/13 Correction method • find position d corresponding to x: • Place intensity on d at position x by means of interpolation • Trilinear • Cubic spline • Truncated sinc
State of the art 13/13 Advantages, Problems & restrictions • Advantages • Simple continuous description one polynomial transform • Problems & restrictions • Unable to describe local deformations • Does not work well for “exotic” global deformation fields
Local Estimation 1/5 Local EstimationOverview: • Not entire 3D dataset but sub volume • Estimating transformation for every sub volume • Expected Advantages • Expected Disadvantages
Local Estimation 2/5 Not entire 3D dataset but sub volume • Use of 3D data subsets overlapping sub volumes
Local Estimation 3/5 Estimating transformation for every sub volume • n sub volumes n sets of polynomial parameters • So a system of equation for every subvolume
Local Estimation 4/5 Expected Advantages • Better estimation of very local or higher-order global deformations
Local Estimation 5/5 Expected Disadvantages • For every n sets of sub-volumes n polynomial estimations needed more calculation time • High order needs more memory • Risk of edge effects needs large amount of patch-overlap 3Dspace
Mathematics 1/12 MathematicsOverview: • Polynomial transformation • Used solution method for Least Squares Problem: • Singular Value Decomposition • Methods used in SVD computation: • Singular values σi: Householder and Givens • Left and right eigenvectors using the σi • Error calculation and testing • as maximum likelihood • fit
Mathematics 2/12 Polynomial Transformation Number of coordinate combinations and transformation parameters to be estimated as function of order for every volume or sub volume:
Mathematics 3/12 Used solution method for Least Squares Problem • Rewriting transformation as system of equations: • A: design matrix, containing the coordinate combinations • b: vector with deformed point coordinates
Mathematics 4/12 Used solution method for Least Squares Problem • Singular Value Decomposition • U, V: orthogonal,left and right singular vectors resp. • W: diagonal matrix with singular values
Mathematics 5/12 Methods used in SVD computation • Computing singular values by using: • Householder reduction • Givens Rotations • Left and right singular vectors
Mathematics 6/12 Singular values 1/4Householder reduction • Matrix : • Householder matrix: with: and , ith column of Using this matrix 2 times n-2 times to bi-diagonalize A. Full diagonalization by Givens Rotations:
Mathematics 7/12 Singular values 2/4Givens Rotations • Plane rotation:
Mathematics 8/12 Singular values 3/4Givens Rotations 2/ and then: Zero by:
Mathematics 9/12 Singular values 4/4Givens Rotations 2/ Now construction of : With elements .
Mathematics 10/12 Left and right singular vectors • Left singular vectors: • Right singular vector: • Solution:
Mathematics 11/12 Goodness of Fit estimation • as maximum likelihood estimate • Goodness-of-Fit by means of incomplete - function
Mathematics 12/12 Goodness of Fit estimationSolution vector using SVD tot minimize:Goodness of Fit:Chi-square exceedance by chance
Software 1/3 • Overview
Software 2/3 • Estimation loop
Software 3/3 • Application loop
Validation 1/17 Validation • Performance of the local estimator: d = deformed point rt = retransformed point3D visualization • Maxima, minima, st. dev. of Euclidian distance in the patch • Goodness of Fit measurement • estimate - fit
Validation 2/17 Validation • Global up to 4th order deformation • Origin in center • Origin in corner • Local deformation • Divide space into four parts
Validation 3/17 Global DeformationApplied to both the cornered as centered data set
Validation 4/17 Origin in center 1 • 3D display:
Validation 5/17 Origin in center 2 • Histogram of introduced error by initial manual deformation
Validation 6/17 Origin in center 3 • Error histogram between initial deformed and globally re-transformed data set
Validation 7/17 Origin in center 4 • Error histogram between initial deformed and locally re-transformed data set
Validation 8/17 Origin in corner 1 • 3D display:
Validation 9/17 Origin in corner 2 • Histogram of introduced error by initial manual deformation