Download
1 / 44
860 likes | 1.93k Views
The Finite Element Method Introduction. Linear Structural Analyse - Truss Structure - Beam - Shell - 3-D Solid Material nonlinear - Plasticity (Structure with stresses above yield stress) - Hyperelasticity (ν = 0.5, i.e. Rubber)

E N D
The Finite Element Method Introduction
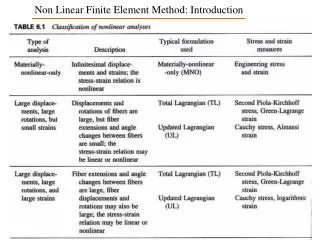
Linear Structural Analyse - Truss Structure - Beam - Shell - 3-D Solid Material nonlinear - Plasticity (Structure with stresses above yield stress) - Hyperelasticity (ν = 0.5, i.e. Rubber) - Creep, Swelling
Geometric nonlinear - Large Deflection - Stress Stiffening Dynamics - Natural Frequency - Forced Vibration - Random Vibration
Stability - Buckling Field Analysis - Heat Transfer - Magnetics - Fluid Flow - Acoustics
Evolution of the Finite Element Method 1941 HRENIKOFF, MC HENRY, NEWMARK Approximation of a continuum Problem through a Framework 1946 SOUTHWELL Relaxation Methods in theoretical Physics 1954 ARGYRIS, TURNER Energy Theorems and Structural Analysis (general Structural Analysis for Aircraft structures) 1960 CLOUGH FEM in Plane Stress Analysis
FE = Finite Element i, j, k = Nodal points (Nodes) of an Element - Dividing a solid in Finite Elements - Compatibility between the Elements through a displacement function - Equilibrium condition through the principal of virtual work
The stiffness relation: [K] {d} = {F} or K d = F K = Total stiffness matrix d = Matrix of nodal displacements F = Matrix of nodal forces
K d = F dT = [u1 v1 w1 . . . un vn wn] FT = [Fx1 F y1 . . . F xn F yn F zn] K is a n x n matrix K is a sparse matrix and symmetric
K d = F Solving the stiffness relation by: - CHOLESKY – Method - WAVE – FRONT – Method
k F1 F2 1 2 u1 u2 Spring Element F1 = k (u1 – u2) F2 = k (u2 – u1) 1, 2 = Nodes F1, F2 = Nodal forces k = Spring rate u1, u2 = Nodal displacements
k1 k2 1 2 3 F1 F3 F2 u1 u2 u3 Spring System Element stiffness matrices
the stiffness relation by using superposition Total stiffness matrix
y u2 F2 2 u1 A F1 x 1 Truss Element = length A = cross-sectional area E = Young´s modulus Spring rate of a truss element Element stiffness matrix c = cosα s = sinα
y Fy3 3 Fx3 A E A E 2 = 1350 1 = 450 2 1 x Element :Element : Node 1 1 Node 1 2 Node 2 3 Node 2 3 Stiffness relation
y y 1 2 2 1 v1 v2 M1 M2 EJ x x 1 2 Q1 Q2 Beam Element Forces Displacements A = Cross – sectional area E = Young’s modulus I = Moment of inertia = Length
Example for practical FEM application Engineering system Possible finite element model
v3 y 3 u3 v2 v1 u2 2 1 u1 x Plane stress Triangular Element Equilibrium condition: Principal of virtual work Compatibility condition: linear displacement function
General displacements (Displacement function) u(x,y) = α1 + α2x + α2y v(x,y) = α4 + α5x + α6y Nodal displacements u1= α1 + α2x1+ α3y1 v1= α4 + α5x1+ α6y1 similar for node 2 and node 3.
u = N d General displacements to nodal displacements ε = B d Strains to nodal displacements σ = D ε Stresses to strains σ = D B d Stresses to nodal displacements
3 5 2 4 1 Other displacement functions Triangular element with 6 nodes 6 quadratic displacement function u(x,y) = α1 + α2x + α3y+ α4x2 + α5y2+α6xy v(x,y) = α7 + α8x + α9y+ α10x2 + α11y2+α12xy
7 6 10 2 5 4 1 3 8 Triangular element with 10 nodes 9 cubic displacement function - stress field can be better approximated - more computing time - less numerical accuracy - geometry cannot be good approximated
Principal of Virtual Work δU + δW = 0 δU = virtual work done by the applied force δW = stored strain energy σ = stress matrix p = force matrix ε = strain matrix u = displacement matrix
Element stiffness matrix D = Elasticity matrix
b1 = y2 – y3 c1 = x3 – x2 b2 = y3 – y1 c2 = x1 – x3 AΔ = Area of element b3 = y1 – y2 c3 = x2 – x1 linear displacement function yields : - linear displacement field - constant strain field - constant stress field
m1 m2 m0 k1 k2 c1 c2 u0 u1 u2 F0 F1 F2 Dynamics Equation of motion
or M = Mass matrix C = Damping matrix K = Stiffness matrix d = Nodal displacement matrix = Nodal velocity matrix = Nodal acceleration matrix
for a continuum u = N d ε = B d
the element matrices ρ = Mass density μ = Viscosity matrix
General Equation of Motion Types of dynamic solution o Modal analysis o Harmonic response analysis - Full harmonic - Reduced harmonic o Transient dynamic analysis - Linear dynamic - Nonlinear dynamic
Modal Analysis Purpose: To determine the natural frequencies and mode shapes for the structure Assumptions: Linear structure (M, K, = constant) No Damping (c = 0 ) Free Vibrations (F = 0)
for harmonic motion: d =d0 cos (ωt) (-ω2M + K) d0 = 0 Eigenvalue extraction procedures Transformation methods Iteration methods JACOBI INVERSE POWER GIVENS INVERSE POWER WITH SHIFTS HOUSEHOLDER SUB – SPACE ITERATION Q – R METHOD
Harmonic Response Analysis Purpose: To determine the response of a linear system Assumptions: Linear Structure (M, C, K = constant) Harmonic forcing function at known frequency
Forcing funktion F = F0e-iωt Response will be harmonic at input frequency d = d0 e-iωt (-ω2M – iωC + K) d = F0 is a complex matrix d will be complex (amplitude and phase angle)
Limiting cases: ω = 0 : K d = F0 Static solution C = 0 : (-ω2M + K) d = F0 Response in phase C = 0, ω = ωn : (-ωn2M + K) d = F0 infinite amplitudes C = 0, ω = ωn : (-ωn2M - iωnC + K) d = F0 finite amplitudes, large phase shifts
Transient Dynamic Analysis F(t) = arbitrary time history forcing function periodic forcing function
impulsive forcing function Earthquake in El Centro, California18.05.1940
Two major types of integration: - Modal superposition - Direct numerical integration
1 2 T0 T1 T2 Q0 Q1 Q2 1, A1 2, A2 0 1 2 , A 0ne-dimensional heat flow principle , = conductivity elements = convection element 0, 1, 2 = temperature elements A = Cross-sectional area = Length λ = Conductivity Aα = Convection surface T = Temperature Q = Heat flow C = Specific heat α = Coefficient of thermal expansion
Heath flow through a conduction element: Heat stored in a temperature element: cp = specific heat capacity C = specific heat Heat transition for a convection element: Q = A(T – T2)
Heat balance or
C = specific heat matrix K = conductivity matrix Q = heat flow matrix T = temperature matrix = time derivation of T For the stationary state with = 0 KT = Q