Download
1 / 1
10 likes | 147 Views
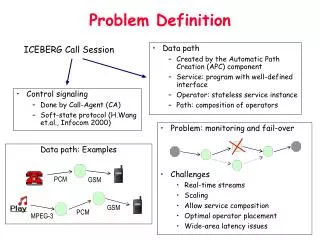
Energy Aware Task Mapping Algorithm For Heterogeneous MPSoC Based Architectures Amr M. A. Hussien¹, Ahmed M. Eltawil¹, Rahul Amin 2 and Jim Martin 2 ¹ Wireless Systems and Circuits Laboratory, University of California, Irvine, CA 2 Clemson University, Clemson, SC . Carrier 1: EVDO.

E N D
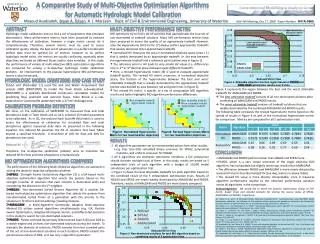
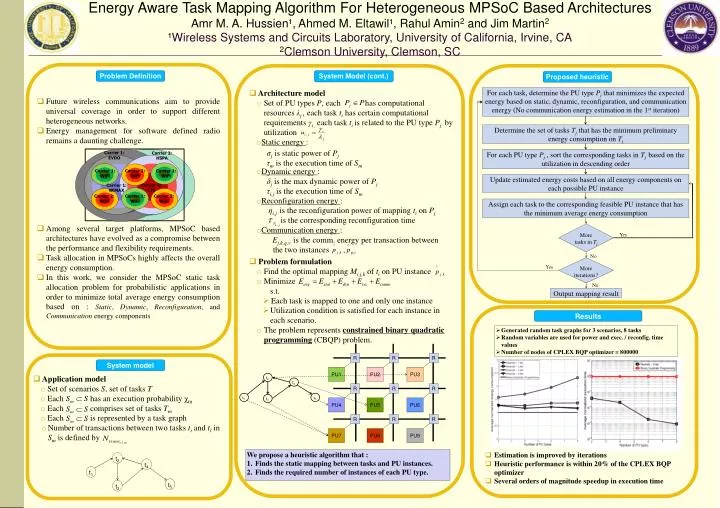
Energy Aware Task Mapping Algorithm For Heterogeneous MPSoC Based ArchitecturesAmr M. A. Hussien¹, Ahmed M. Eltawil¹, Rahul Amin2 and Jim Martin2¹Wireless Systems and Circuits Laboratory, University of California, Irvine, CA 2Clemson University, Clemson, SC Carrier 1: EVDO Carrier 2: HSPA Carrier 2: WiFi Carrier 1: WiFi Carrier 2: WiFi Carrier 2: WiFi Carrier 1: WiFi Carrier 1: WiFi Problem Definition System Model (cont.) Proposed heuristic Carrier 1: WiMAX Carrier 2: LTE • Architecture model • Set of PU types P, each has computational resources λj , each task ti has certain computational requirements γi , each task tiis related to the PU type Pjby utilization • Static energy : • Dynamic energy : • Reconfiguration energy : • Communication energy : For each task, determine the PU type Pj that minimizes the expected energy based on static, dynamic, reconfiguration, and communication energy (No communication energy estimation in the 1st iteration) • Future wireless communications aim to provide universal coverage in order to support different heterogeneous networks. • Energy management for software defined radio remains a daunting challenge. • Among several target platforms, MPSoC based architectures have evolved as a compromise between the performance and flexibility requirements. • Task allocation in MPSoCs highly affects the overall energy consumption. • In this work, we consider the MPSoCstatic task allocation problem for probabilistic applications in order to minimize total average energy consumption based on : Static, Dynamic, Reconfiguration, and Communication energy components Determine the set of tasks Tj that has the minimum preliminary energy consumption on Tj • σj is static power of Pj • τmis the execution time of Sm For each PU type Pj , sort the corresponding tasks in Tj based on the utilization in descending order Update estimated energy costs based on all energy components on each possible PU instance • δjis the max dynamic power of Pj • τi,jis the execution time of Sm Assign each task to the corresponding feasible PU instance that has the minimum average energy consumption • ηi,j is the reconfiguration power of mapping ti on Pj • is the corresponding reconfiguration time More tasks in Tj Yes • Ej,k,q,vis the comm. energy per transaction between the two instances , No • Problem formulation • Find the optimal mapping Mi,j,k of ti on PU instance • Minimize • s.t. • Each task is mapped to one and only one instance • Utilization condition is satisfied for each instance in each scenario. • The problem represents constrained binary quadratic programming (CBQP) problem. More iterations? Yes No Output mapping result Results • Generated random task graphs for 3 scenarios, 8 tasks • Random variables are used for power and exec. / reconfig. time values • Number of nodes of CPLEX BQP optimizer = 800000 R R R System model PU1 PU2 PU3 • Application model • Set of scenarios S, set of tasks T • Each has an execution probability χm • Each comprises set of tasks Tm • Each is represented by a task graph • Number of transactions between two tasks ti and tl in Sm is defined by t2 t4 R R R t1 t5 t3 PU4 PU5 PU6 R R R PU7 PU8 PU9 We propose a heuristic algorithm that : Finds the static mapping between tasks and PU instances. Finds the required number of instances of each PU type. • Estimation is improved by iterations • Heuristic performance is within 20% of the CPLEX BQP optimizer • Several orders of magnitude speedup in execution time t2 t4 t1 t5 t3