Download
1 / 1
10 likes | 111 Views
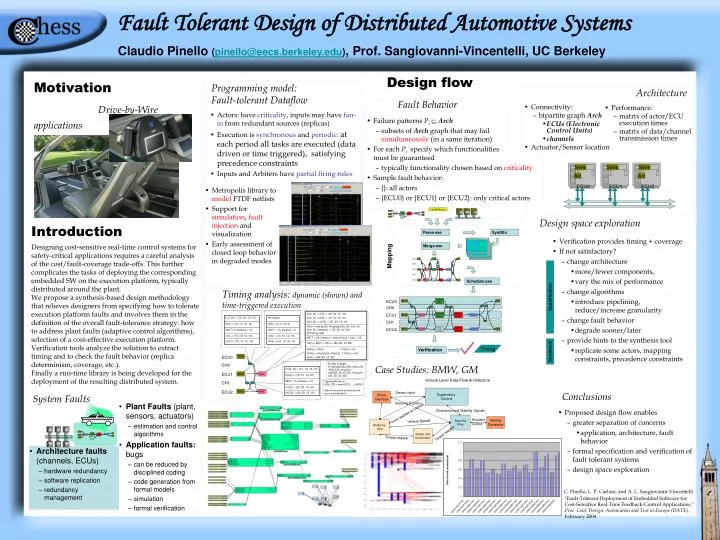
Fault Tolerant Design of Distributed Automotive Systems. Supervisory Control. Sensor Input. Driver Interface. Steering Position. Directional and Stability Signals. Sens. Sens. Forces applied on Vehicle. Coarse CTRL. Coarse CTRL. Act. Act. Arbiter Best. Arbiter Best. Steer By

E N D
Fault Tolerant Design of Distributed Automotive Systems Supervisory Control Sensor Input Driver Interface Steering Position Directional and Stability Signals Sens Sens Forces applied on Vehicle Coarse CTRL Coarse CTRL Act Act Arbiter Best Arbiter Best Steer By Wire Output Output Actuator Output Vehicle Dynamics CoarseCTRL Input Input ECU0 Vehicle Speed Sens Sens Brake by wire Sens Act Act Act Fine CTRL Fine CTRL Sens Sens Power Unit Coordinator Torque req/ack CH0 Torque req/ack Merge.exe Output ArbiterBest ECU1 Input Sens CoarseCTRL Motivation Drive-by-Wire applications CH1 Sens Sens Sens ECU0 ECU0 ECU1 ECU1 ECU2 ECU2 Sens Sens Sens Act Act Act Act ECU2 Sens Input Act ArbiterBest FineCTRL Output Claudio Pinello (pinello@eecs.berkeley.edu), Prof. Sangiovanni-Vincentelli, UC Berkeley Design flow Architecture Programming model: Fault-tolerant Dataflow Fault Behavior • Connectivity: • bipartite graph Arch • ECUs (Electronic Control Units) • channels • Actuator/Sensor location • Performance: • matrix of actor/ECU execution times • matrix of data/channel transmission times • Actors: have criticality, inputs may have fan-in from redundant sources (replicas) • Execution is synchronous and periodic: at each period all tasks are executed (data driven or time triggered), satisfying precedence constraints • Inputs and Arbiters have partial firing rules • Failure patterns Pi Arch • subsets of Arch graph that may fail simultaneously (in a same iteration) • For each Pi specify which functionalities must be guaranteed • typically functionality chosen based on criticality • Sample fault behavior: • {}: all actors • {ECU0} or {ECU1} or {ECU2}: only critical actors • Metropolis library to model FTDF netlists • Support for simulation, fault injection and visualization • Early assessment of closed loop behavior in degraded modes FaultBehavior Design space exploration Introduction Designing cost-sensitive real-time control systems for safety-critical applications requires a careful analysis of the cost/fault-coverage trade-offs. This further complicates the tasks of deploying the corresponding embedded SW on the execution platform, typically distributed around the plant. We propose a synthesis-based design methodology that relieves designers from specifying how to tolerate execution platform faults and involves them in the definition of the overall fault-tolerance strategy: how to address plant faults (adaptive control algorithms), selection of a cost-effective execution platform. Verification tools analyze the solution to extract timing and to check the fault behavior (replica determinism, coverage, etc.). Finally a run-time library is being developed for the deployment of the resulting distributed system. Parse.exe SynDEx • Verification provides timing + coverage • If not satisfactory? • change architecture • more/fewer components, • vary the mix of performance • change algorithms • introduce pipelining, reduce/increase granularity • change fault behavior • degrade sooner/later • provide hints to the synthesis tool • replicate some actors, mapping constraints, precedence constraints Mapping Schedule.exe Timing analysis: dynamic (shown) and time-triggered execution Specification Coarse CTRL ECU0 Sens Act CH0 Coarse CTRL Arbiter Best ECU1 Sens Input Output CH1 Fine CTRL Arbiter Best ECU2 Sens Input Output Act Timing Verification Synthesis Case Studies: BMW, GM Vehicle Level Data-Flow Architecture Conclusions System Faults • Plant Faults (plant, sensors, actuators) • estimation and control algorithms • Application faults: bugs • can be reduced by disciplined coding • code generation from formal models • simulation • formal verification • Proposed design flow enables • greater separation of concerns • application, architecture, fault behavior • formal specification and verification of fault tolerant systems • design space exploration C. Pinello, L. P. Carloni, and A. L. Sangiovanni-Vincentelli "Fault-Tolerant Deployment of Embedded Software for Cost-Sensitive Real-Time Feedback-Control Applications," Proc. Conf. Design, Automation and Test in Europe (DATE), February 2004 • Architecture faults (channels, ECUs) • hardware redundancy • software replication • redundancy management