Download
1 / 68
680 likes | 802 Views
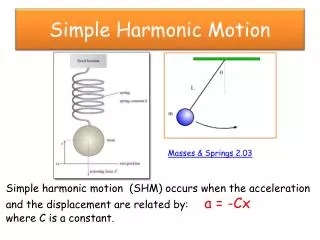
Simple Harmonic Motion. Periodic Motion. defined: motion that repeats at a constant rate equilibrium position: forces are balanced . Periodic Motion. For the spring example, the mass is pulled down to y = -A and then released.

E N D
Periodic Motion • defined: motion that repeats at a constant rate • equilibrium position: forces are balanced
Periodic Motion • For the spring example, the mass is pulled down to y = -A and then released. • Two forces are working on the mass: gravity (weight) and the spring.
Periodic Motion • for the spring: ΣF = Fw + Fs ΣFy = mgy + (-kΔy)
Periodic Motion • Damping: the effect of friction opposing the restoring force in oscillating systems
Periodic Motion • Restoring force (Fr): the net force on a mass that always tends to restore the mass to its equilibrium position
Simple Harmonic Motion • defined: periodic motion controlled by a restoring force proportional to the system displacement from its equilibrium position
Simple Harmonic Motion • The restoring force in SHM is described by: Fr x = -kΔx • Δx = displacement from equilibrium position
Simple Harmonic Motion • Table 12-1 describes relationships throughout one oscillation
Simple Harmonic Motion • Amplitude: maximum displacement in SHM • Cycle: one complete set of motions
Simple Harmonic Motion • Period: the time taken to complete one cycle • Frequency: cycles per unit of time • 1 Hz = 1 cycle/s = s-1
1 1 f = T = T f Simple Harmonic Motion • Frequency (f) and period (T) are reciprocal quantities.
Reference Circle • Circular motion has many similarities to SHM. • Their motions can be synchronized and similarly described.
m T = 2π k Reference Circle • The period (T) for the spring-mass system can be derived using equations of circular motion:
m T = 2π k Reference Circle • This equation is used for Example 12-1. • The reciprocal of T gives the frequency.
Overview • Galileo was among the first to scientifically study pendulums.
Overview • The periods of both pendulums and spring-mass systems in SHM are independent of the amplitudes of their initial displacements.
Pendulum Motion • An ideal pendulum has a mass suspended from an ideal spring or massless rod called the pendulum arm. • The mass is said to reside at a single point.
Pendulum Motion • l = distance from the pendulum’s pivot point and its center of mass • center of mass travels in a circular arc with radius l.
Pendulum Motion • forces on a pendulum at rest: • weight (mg) • tension in pendulum arm (Tp) • at equilibrium when at rest
Restoring Force • When the pendulum is not at its equilibrium position, the sum of the weight and tension force vectors moves it back toward the equilibrium position. Fr = Tp + mg
Restoring Force • Centripetal force adds to the tension (Tp): Tp = Tw΄+ Fc , where: Tw΄ = Tw = |mg|cosθ Fc = mvt²/r
Restoring Force • Total acceleration (atotal) is the sum of the tangential acceleration vector (at) and the centripetal acceleration. • The restoring forces causes this atotal.
Restoring Force • A pendulum’s motion does not exactly conform to SHM, especially when the amplitude is large (larger than π/8 radians, or 22.5°).
Small Amplitude • defined as a displacement angle of less than π/8 radians from vertical • SHM is approximated
l T = 2π |g| Small Amplitude • For small initial displacement angles:
l T = 2π |g| Small Amplitude • Longer pendulum arms produce longer periods of swing.
l T = 2π |g| Small Amplitude • The mass of the pendulum does not affect the period of the swing.
l T = 2π |g| Small Amplitude • This formula can even be used to approximate g (see Example 12-2).
Physical Pendulums • mass is distributed to some extent along the length of the pendulum arm • can be an object swinging from a pivot • common in real-world motion
Physical Pendulums • The moment of inertia of an object quantifies the distribution of its mass around its rotational center. • Abbreviation: I • A table is found in Appendix F of your book.
I T = 2π |mg|l Physical Pendulums • period of a physical pendulum:
Damped Oscillations • Resistance within a spring and the drag of air on the mass will slow the motion of the oscillating mass.
Damped Oscillations • Damped harmonic oscillators experience forces that slow and eventually stop their oscillations.
Damped Oscillations • The magnitude of the force is approximately proportional to the velocity of the system: fx = -βvx β is a friction proportionality constant
Damped Oscillations • The amplitude of a damped oscillator gradually diminishes until motion stops.
Damped Oscillations • An overdamped oscillator moves back to the equilibrium position and no further.
Damped Oscillations • A critically damped oscillator barely overshoots the equilibrium position before it comes to a stop.
Driven Oscillations • To most efficiently continue, or drive, an oscillation, force should be added at the maximum displacement from the equilibrium position.
Driven Oscillations • The frequency at which the force is most effective in increasing the amplitude is called the natural oscillation frequency (f0).
Driven Oscillations • The natural oscillation frequency (f0) is the characteristic frequency at which an object vibrates. • also called the resonant frequency
Driven Oscillations • terminology: • in phase • pulses • driven oscillations • resonance
Driven Oscillations • A driven oscillator has three forces acting on it: • restoring force • damping resistance • pulsed force applied in same direction as Fr
Driven Oscillations • The Tacoma Narrows Bridge demonstrated the catastrophic potential of uncontrolled oscillation in 1940.
Waves • defined: oscillations of extended bodies • medium: the material through which a wave travels
Waves • disturbance: an oscillation in the medium • It is the disturbance that travels; the medium does not move very far.
Graphs of Waves Waveform graphs Vibration graphs