Download
1 / 16
160 likes | 255 Views
Süsteemide kompositsioon:. 1) Järjestikühendus. s 1. s 2. Y 1 (s). Y 2 (s). U 1 (s). U 2 (s). H 1 (s). H 2 (s). Y 2 (s). U 1 (s). U(s). Y(s). H(s). 2 järjestikku. n järjestikku. 2) Paralleelühendus. H 1 (s). Y 1 (s). U 1 (s). +. U(s). Y(s). ●. +. Y 2 (s). U 2 (s). U(s).

E N D
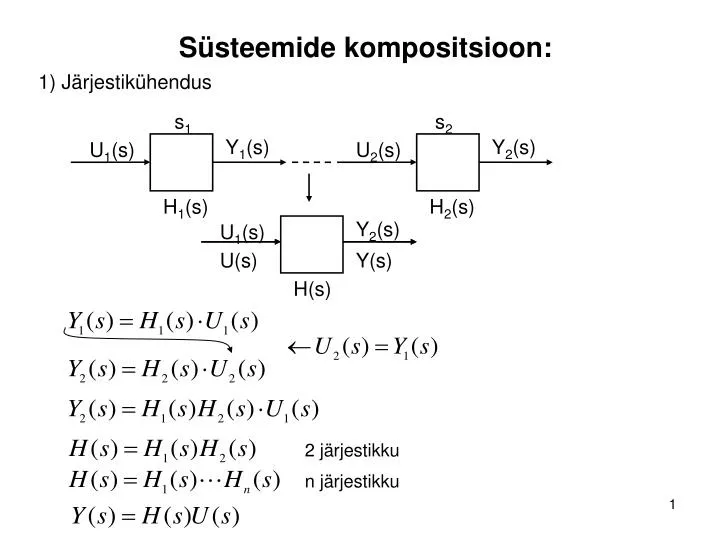
Süsteemide kompositsioon: 1) Järjestikühendus s1 s2 Y1(s) Y2(s) U1(s) U2(s) H1(s) H2(s) Y2(s) U1(s) U(s) Y(s) H(s) 2 järjestikku n järjestikku
2) Paralleelühendus H1(s) Y1(s) U1(s) + U(s) Y(s) ● + Y2(s) U2(s) U(s) Y(s) H2(s) H(s) 2 paralleelselt n paralleelselt
3) Tagasisideühendus H1(s) U(s) U1(s) Y1(s) ± Y2(s) U2(s) U(s) Y(s) H2(s) H(s)
_ - positiivne tagasiside + + - negatiivne tagasiside ● Lihtsatest süsteemidest on võimalik moodustada (soovitud omadustega) keerukaid süsteeme. ● Moodustuvad mitmemõõtmelised süsteemid (mitu sisendit või mitu väljundit). Näide No. 1 u2(t) + y1(t) u1(t) + ● H1(s) H2(s) _ + + H3(s) ● _ y2(t) u3(t)
u1(t) y1(t) u2(t) u3(t) y2(t) sisendid väljundid 6 ülesannet Üritame matemaatiliselt kirjeldada moodustunud süsteemi Ülekanne: Ülekanne:
Ülekanne: Ülekanne: Ülekanne:
Ülekanne: H(s) – ülekandemaatriks (koosneb ülekandefunktsioonidest)
Näide No. 2 u2(t) y(t) u1(t) + + H1(s) H2(s) ● H3(s) Leida Lahendus:
Lahutame osamurdudeks 5 ∕ 2 3 3 1 ∕ 2
Süsteemi olekumudel Esimest järku diferentsiaalvõrrandite süsteemi koostamine (bm … b1= 0) Olekumuutujad: Olekuvõrrandid:
OLEKUMUDEL Lineaarse, mittestatsionaarnse, pidevaja süsteemi olekumudel A(nn) - olekumaatriks B(nr) - sisendmaatriks C(mn) - väljundmaatriks D(mr)- otse(edasi)sidemaatriks Lineaarse, statsionaarse, diskreetaja süsteemi olekumudel
Olekuvõrrandid maatrikskujul X(t) = [x1(t) x2(t) … xn(t)]Tn 1 olekumuutujate vektor Väljundvõrrand C = [1 0 0 … 0] (1 n) y(t) = CX(t)
Olekumudeli näide 1Antenni mudel Antenni keerab mootor (juhtsignaal sisendpinge V), nurga anduri järgi saab leida ka nurga muutumise kiirusrad/s. - antenni nurk rad, - antenni nurga muutumise kiirus, J - kõikide keerlevate osade inertsmoment kg m2, Bs - igasuguste sumbumiste summaarne koefitsient kg m2/s] M - mootori poolt arendatav moment kg m2/s2, M = k·U(t), U(t) - mootori sisendpinge V, Pöördliikumist kirjeldav pöördemomentide tasakaaluvõrrand (diferentsiaalvõrrandina): Sellest võrrandist saab tuletada olekumudeli valides X1-ks ja X2-ks
Antenni mudeli kirjeldus olekumudelina Üldkujul maatriksesituses: Valides olekumudelis X1-ks ja X2-ks , saame: B A
0+ Olekumudeli näide 2Õhupalli mudel 0+ Olekuvõrrandid: U0+u v H0+h
Olekuvõrrandi karakteristlik polünoom det(sE-A); Karakteristliku võrrandi det(sE-A)=0juured on A omaväärused. Ülekandemaatriks
