Download
1 / 30
310 likes | 359 Views
Learn about dynamic games with incomplete information - representing games, player actions, payoffs, and equilibrium concepts. Explore extensive form representation and key terms such as subgames and information sets.

E N D
Lecture 3 26.03.2010 M9302 Mathematical Models in Economics 3.1.Dynamic Games of Complete but Imperfect Information Instructor: Georgi Burlakov
Quick Revision on Lecture 1 & 2 • Static versus Dynamic Games • Complete versus Incomplete Information • Normal versus Extensive Form
How to solve the GT problem? Solution Concepts: • Perfect Bayesian Equilibrium (PBNE) • Strategic Dominance • Nash Equilibrium (NE) in static games of complete information • Backwards Induction • Subgame-Perfect Nash Equilibrium (SPNE) in dynamic games of complete information • Bayesian Nash Equilibrium (BNE) in static games of incomplete information in dynamic games of incomplete information
Revision: Students’ Dilemma(static game) • IESDS Solution: OTHERS YOU Unique Nash Equilibrium: {EASY/EASY; HARD/HARD}
Revision: Students’ Dilemma -2(static game) • Nash Equilibrium Solution: OTHERS YOU Two Nash Equilibria: {EASY/EASY; HARD/HARD}
Revision: Students’ Dilemma -2(dynamic game of perfect info) • Backwards Induction Solution: YOU Easy Hard OTHERS OTHERS Easy Hard Easy Hard -2 -2 -3 -1 -1 -3 0 0 Three Pure-strategy Nash Equilibria, Unique Subgame-Perfect N.E.: {EASY/(EASY,HARD)}
Dynamic games of complete but imperfect information • The aim of the third lecture is to show: 1. How to represent a static game in extensive form? 2. What is a subgame? How to use it in solving dynamic games of complete but imperfect information?
Dynamic games of complete but imperfect information • Informally, the games of this class could be described as follows: • First, Players 1 and 2 simultaneously choose actions a1 and a2 from feasible sets A1 and A2, respectively • Second, players 3 and 4 observe the outcome of the first stage, (a1, a2), and then simultaneously choose actions a3 and a4 from feasible sets A3 and A4, respectively. • Finally, based on the resulting combination of actions chosen in total, each player receives a given payoff.
Dynamic Games of Complete and Imperfect Information Standard assumptions: • Players move at different, sequential moments – it is DYNAMIC • The players’ payoff functions are common knowledge – it is COMPLETE INFORMATION • At each stage of the game players move simultaneously – it is IMPERFECT INFORMATION
How to describe a dynamic game? • The extensive form representation of a game specifies: • Who are the PLAYERS. 2.1. When each player has the MOVE. 2.2. What each player KNOWS when she is on a move. 2.3. What ACTIONS each player can take. 3. What is the PAYOFF received by each player.
Example 3.1.: Students’ Dilemma -2(Dynamic version with imperfect info) • Extensive Form Representation: • Reduce the players to 2 groups by 2 players. 2.1. First, YOU and OTHERS from your group choose SIMULTANEOUSLY an action from the set Ai = {Easy, Hard} 2.2. Second, the players from the second group know what the players of the first group have chosen. 2.3. Both players from the second group choose an ACTION simultaneously from the set Ai = {Easy, Hard} 3. Payoffs: ui(a1, a2,a3, a4)=LEISURE(ai)-GRADE(a1, a2,a3, a4)
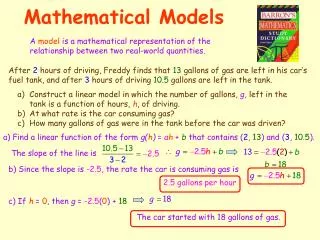
Example 3.1.: Students’ Dilemma -2(Sequential Version) Grading Policy: the students over the average have a STRONG PASS (Grade A, or 1), the ones with average performance get a PASS (Grade B, or 2) and who is under the average FAIL (Grade F, or 5).
Example 3.1.: Students’ Dilemma – 2(Sequential Version) Leisure Rule: HARD study schedule devotes all the time (leisure = 0) to studying distinct from the EASY one (leisure = 2).
Example 3.1.: Students’ Dilemma -2(Sequential Version) Standard assumptions: • Students choose between HARD and EASY SIMULTANEOUSLY in each stage. • Grading is announced in advance, so it is COMMON KNOWLEDGE to all the students. • Before making a choice in the second stage, the players of the second group observe the first-stage choice of the players of the first group. Simplification assumptions: • Performance depends on CHOICE. • EQUAL EFFICIENCY of studies.
Example 3.1.: Students’ Dilemma – 2(Game Tree Representation) YOU1 Easy Hard OTHERS1 OTHERS1 Hard Hard Easy Easy Y2 Y2 Y2 Y2
Dynamic games of Complete but Imperfect Information – key terms • Information set – a collection of one or more decision nodes such that: • only given player has a move on all the decision nodes in the information set, • if more than one node is included in the information set, the player with the move does not know which of them is reached by the preceding play of the game.
Example 3.1.: Students’ Dilemma – 2(Game Tree Representation) YOU1 Easy Hard OTHERS1 OTHERS1 Hard Hard Easy Easy Y2 Y2 Y2 Y2 E H E H O2 O2 E H E H O2 O2 O2 O2 O2 O2 E E H H E E E H H E H H E E H H 0 0 0 0 -3 -3 -3 -1 -3 -3 -1 -3 -3 -3 -2 -2 -3 -1 -3 -3 -3 -2 -3 -2 -3 -2 -2 -3 -3 -2 -2 -2 -3 -2 -2 -2 -2 -3 -3 -2 -2 -3 -2 -3 -2 -3 -2 -2 -2 -2 -3 -3 -2 -2 -3 -2 -2 -2 -2 -3 -2 -2 -2 -2 With imperfect information backwards induction requires solution of the whole second stage static game. Rule of thumb: Non-singleton information set implies imperfect information and vice versa.
Dynamic games of Complete but Imperfect Information – key terms • Subgame – a piece of a game that remains to be played beginning at any point at which the complete history of the game thus far is common knowledge among the players, i.e.: • begins at a singleton information set • includes all the decision and terminal nodes following but not preceding the starting singleton decision node • does not cut any (non-singleton) information sets.
Example 3.1.: Students’ Dilemma – 2(pure-strategy N.E./mechanical solution of stage 2) YOU1 Easy Hard OTHERS1 OTHERS1 Hard Hard Easy Easy O2 O2 O2 O2 Y2 Y2 Y2 Y2 The pure-strategy N.E. in the second stage game is not unique. Y2 and O2 would cooperate for sure but their choice is uncertain if O1 chooses Easy.
Dynamic games of Complete but Imperfect Information – key terms • Strategy – a complete plan of action – it specifies a feasible action which the player will take in each stage, for every possible history of play through the previous stage.
Example 3.1.: Students’ Dilemma – 2(pure-strategy N.E./mechanical solution of stage 1) YOU1 Easy Hard OTHERS1 OTHERS1 Hard Hard Easy Easy Y2 Y2 Y2 Y2 E H E H O2 O2 E H E H O2 O2 O2 O2 O2 O2 E E H H E E E H H E H H E E H H O2 O2 O2 O2 Y2 Y2 Y2 Y2 4 possible strategies (pairs of actions) appear as solutions of the second-stage static game: [(E,E),(H,H),(E,E),(H,H)];[(E,E),(H,H),(H,H),(H,H)]; [(H,H),(H,H),(E,E),(H,H)];[(H,H),(H,H),(H,H),(H,H)];
Example 3.1.: Students’ Dilemma – 2(pure-strategy N.E./mechanical solution of stage 1) • Possible strategies of group 2 and best responses of group 1: • Strategy 1: [(E,E)(H,H)(E,E)(H,H)] • Strategy 2: [(E,E)(H,H)(H,H)(H,H)] O1 O1 Y1 Y1 • Strategy 3: [(H,H)(H,H)(E,E)(H,H)] • Strategy 4: [(H,H)(H,H)(H,H)(H,H)] O1 O1 Y1 Y1 Is it reasonable to play Easy if YOU1 chose Hard and Hard if all from group 1 chose Easy ?
Example 3.1.: Students’ Dilemma – 2(pure-strategy N.E./mechanical solution of stage 1) • There are six pure-strategy N.E.: • N.E. 1:{[(E,E)[(E,E)(H,H)(E,E)(H,H)]} • N.E. 2:{[(H,H)[(E,E)(H,H)(E,E)(H,H)]} • N.E. 3:{[(E,E)[(E,E)(H,H)(H,H)(H,H)]} • N.E. 4:{[(H,H)[(E,E)(H,H)(H,H)(H,H)]} • N.E. 5:{[(H,H)[(E,E)(H,H)(E,E)(H,H)]} • N.E. 6:{[(H,H)[(H,H)(H,H)(H,H)(H,H)]} Is it reasonable to play Easy if YOU1 chose Hard and Hard if all from group 1 chose Easy ?
Example 3.1.: Students’ Dilemma – 2(subgame-perfect N.E./non-mechanical solution) YOU1 Easy Hard OTHERS1 OTHERS1 Hard Hard Easy Easy Y2 Y2 Y2 Y2 E H H O2 O2 H E H O2 O2 O2 O2 O2 E H H H E H Is it reasonable to expect any from group 2 to play Hard if all from group 1 chose Easy and to play Easy if YOU1 chose Hard? • Suggested Best Strategy of group 2 (Strategy 2): Play Hard if at least one from group 1 played Hard, otherwise play Easy.
Example 3.1.: Students’ Dilemma – 2(subgame-perfect N.E./non-mechanical solution) • The best response of group 1: • Strategy 2: [(E,E)(H,H)(H,H)(H,H)] O1 Y1 • There are two subgame-perfect N.E.: • SGPNE 1:{[(E,E)[(E,E)(H,H)(H,H)(H,H)]} • SGPNE 1:{[(H,H)[(E,E)(H,H)(H,H)(H,H)]}
Dynamic games of Complete but Imperfect Information – SGPNE • (Selten 1965) Subgame-perfect Nash Equilibrium (SGPNE)– a Nash equilibrium is subgame perfect if the players’ strategies constitute a Nash equilibrium in every subgame.
Dynamic games of Complete but Imperfect Information – Summary • Relation between Information Set and Imperfect Information? • Subgame versus Stage Game? • Subgame-perfect Outcome versus Equilibrium?
Example 3.2.: Students’ Dilemma(two-stage repeated game) • The original static Student Dilemma game is played twice in a row: OTHERS YOU • There is a unique N.E. of the static second-stage game: {Hard, Hard}
Example 3.2.: Students’ Dilemma(two-stage repeated game) • Adding the N.E. payoffs to the original payoff matrix yields the first-stage payoff matrix : OTHERS YOU • The subgame-perfect outcome is {(Hard,Hard),(Hard,Hard)}
Finitely Repeated Games • Let G(T) denote the finitely repeated game in which stage game G is played T times, with the outcomes of all preceding plays observed before the next play begins. The payoffs for G(T) are the sum of the payoffs from the T stage games • If G has a unique N.E. then, for any finite T, G(T) has a unique subgame-perfect outcome: N.E. is played in every stage.