Download
1 / 35
380 likes | 573 Views
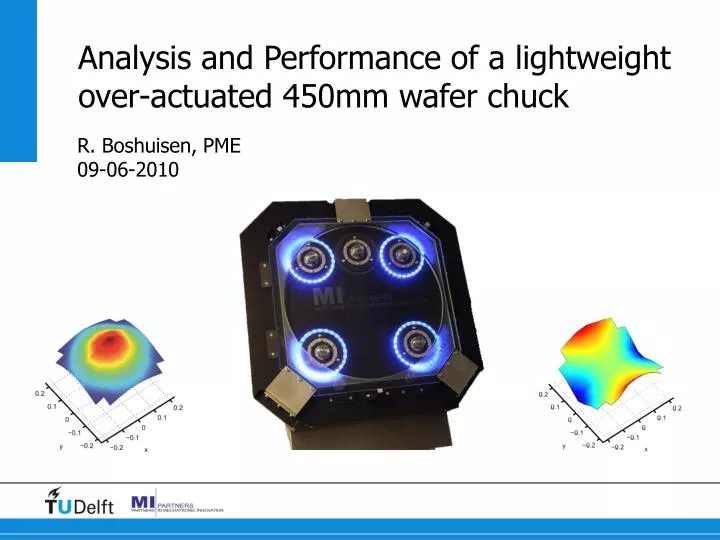
Analysis and Performance of a lightweight over-actuated 450mm wafer chuck. R. Boshuisen, PME 09-06-2010. Rein Boshuisen, PME. Contents. Introduction Problem Description Principle of Over-actuation Test S etup and Analysis Improvements on the Current Setup Conclusions.

E N D
Analysis and Performance of a lightweight over-actuated 450mm waferchuck R. Boshuisen, PME 09-06-2010 Rein Boshuisen, PME
Contents • Introduction • Problem Description • Principle of Over-actuation • Test Setup and Analysis • Improvements on the Current Setup • Conclusions Over-actuation of a waferchuck
Problem description Z X Y Typically wafer chucks are actuated as rigid bodies. Larger wafers leads to heavier wafer stages: 200 mm Wafer m kg 450 mm Wafer > 11 x m kg 300 mm Wafer > 3 x m kg Width: 1.5 Depth 1.5 Thickn: 1.5 Width: 1.5 Depth 1.5 Thickn: 1.5 Modalanalysis Over-actuation of a waferchuck Modalanalysis
Z X Y Problem description Desire to have a LARGE chuck with LOW Mass and HIGH internal modes • Drawbacksof large wafers and chucks: • Larger actuation forces and deformation • Larger power dissipation and thermal load • Internal modes still critical to performance Modalanalysis Over-actuation of a waferchuck Modalanalysis
Alternative: Over-Actuation ALTERNATIVEmeans of ACTUATOR placement Challenge deal withinfinitelymany modes, without adding as manyactuators and controlcomplexity Actuation in nodes Symmetricalactuation Over-actuation of a waferchuck
Eigenmodes of a chuck Modalanalysis Over-actuation of a waferchuck Modalanalysis
First eigenmode - Example Over-actuation of a waferchuck
Eigenmodes of a chuck Modalanalysis Over-actuation of a waferchuck Modalanalysis
Eigenmodes of a chuck Actuatorsonnodeline? Changenodelines? Modalanalysis Over-actuation of a waferchuck Modalanalysis
Topology optimization1 of chuck y x 1Langelaar TU Delft Over-actuation of a waferchuck
Optimization Strategy Modal Coordinates Mechanics Physical Coordinates Minimize the contribution by varying actuator position and cavity diameter : Z Rx Ry Over-actuation of a waferchuck
Optimization result I Modalanalysis Over-actuation of a waferchuck Modalanalysis
Eigenmodes of a chuck 270 Hz 184 Hz 270 Hz Actuator location Green zero displacement 349 Hz 521 Hz Over-actuation of a waferchuck
Optimization result II Modalanalysis Over-actuation of a waferchuck Modalanalysis
Optimization result II Modalanalysis Over-actuation of a waferchuck Modalanalysis
Z X Y Realized Test Setup Three linear encoders Frame Folded Flexures (3x), Fixing Rz, X and Y Actuator assembly (5x) Wafer chuck demonstrator motions in Z, Rx, and Ry Modalanalysis Over-actuation of a waferchuck Modalanalysis
Realized Test Setup Conventional actuation around COG Over-actuation around COG Over-actuation of a waferchuck
Measured Result I Modalanalysis Over-actuation of a waferchuck Modalanalysis
Measured Result II Modalanalysis Over-actuation of a waferchuck Modalanalysis
Control of the chuck 3 Sensors Chuck Dynamics Z Actuation matrix Loc ->CoG RX 3 PID controllers RY Controlwithstandardindustrial controller Bosch-RexRothNYCe 4000 Over-actuation of a waferchuck
Performance of the setup Factor 2 in bandwidth, 4 in stiffness Factor 5 improvement Over-Actuation shows clear benefits compared to conventional actuation! Over-actuation of a waferchuck
Why still excitation of the modes?? Modalanalysis Over-actuation of a waferchuck Modalanalysis
Mode excitation analysis • Improved model • No Symmetry – Possiblecauses • Actuator 5 • GravityCompensators • Platesprings • Chuck The analysis only partially explains the mode excitations Over-actuation of a waferchuck
Improvements of the current setup • Sensor-placement / Over-Sensing Over-actuation of a waferchuck
Control of the chuck 3 Sensors Chuck Dynamics Z Actuation matrix Loc ->CoG RX 3 PID controllers RY Controlwith: Matlab/Simulink, usingxPc Target software Over-actuation of a waferchuck
Over-Sensing • AdjustSensorpositionsuch, that the excitation of the modes is notconverted to CoGmovement • Place sensor in a node • Symmetric sensor placement Over-actuation of a waferchuck
Over-Sensing Over-actuation of a waferchuck
Over-Sensing • This sensor placement candistinguish the first and second eigenmode from the rigid body movement • Active damping of first eigenmode! Over-actuation of a waferchuck
Over-Sensing - Performance Over-actuation of a waferchuck
Conclusion • Over-actuation is succesfullyimplementedon a waferchuckwithanincreased performance as result. • Symmetry is criticalfor the positions of the nodelineson the diagonals • Include sensor positionoptimization in the design phase • Usefour sensors to beable to actively damp the first eigenmode Over-actuation of a waferchuck
Analysis and Performance of a lightweight over-actuated 450mm waferchuck R. Boshuisen, PME 09-06-2010 Rein Boshuisen, PME
DynamicAnalysis – effect of rotatedchuck Over-actuation of a waferchuck
DynamicAnalysis – effect of GravityCompensator Over-actuation of a waferchuck
Damping • Chuck is verylightlydamped, increasingdamping, reduces maximum peak-hight, leading to lesssensitivity of the actuator placement Over-actuation of a waferchuck