Download
1 / 18
360 likes | 1.13k Views
Torque. Chapter 9 – Rotational Dynamics. What is Torque?. Torque is a rotational force around a fixed axis or point. Torque. Torque is represented using the Greek letter tau as follows: = Fd sin θ -Where F = Force (Newtons) d = lever arm length

E N D
Torque Chapter 9 – Rotational Dynamics
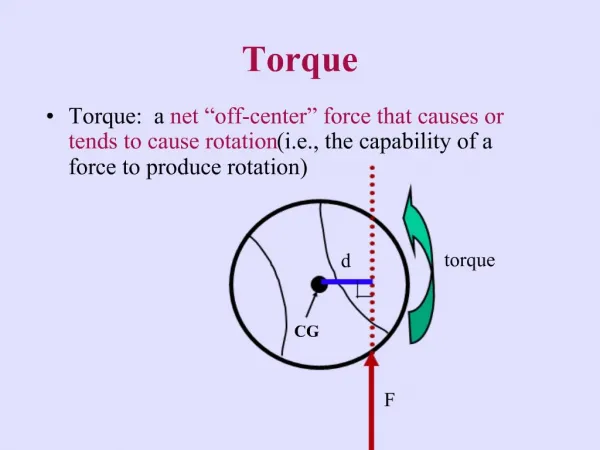
What is Torque? • Torque is a rotational force around a fixed axis or point.
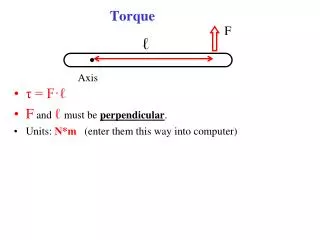
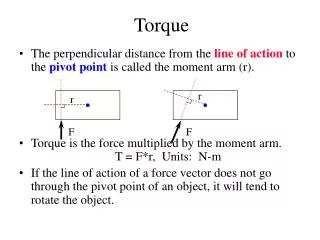
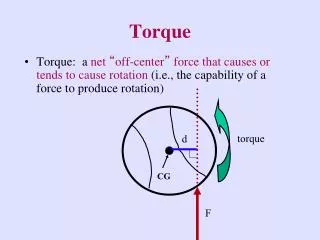
Torque • Torque is represented using the Greek letter tau as follows: = Fd sinθ -Where F = Force (Newtons) d = lever arm length θ = angle that force makes with the axis of the lever arm Note: Torque is a vector quantity.
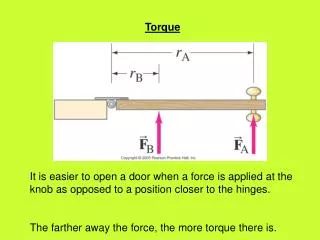
F1 F2 d1 d2 Factors that affect Torque • Distance: The distance from the point of rotation affects torque in such a manner that the further you are from the axis of rotation, the easier it is to rotate around that point. Note: The distance d is also known as the lever arm.
d F θ θ Factors that affect Torque • Angle: Torque also depends on the angle at which the force makes with the lever arm. Torque is maximum when the force makes a 90° angle with the lever arm.
F2 F1 d d Factors that affect Torque • Force: Torque is directly proportional to the force applied to the lever arm. As the force increases, so does the torque. F2 > F1 2 > 1
Fulcrum Torque & Seesaws • Equilibrium: Equilibrium exits when the seesaw is balanced such that it will not tend to rotate around the fulcrum. • At Equilibrium: • There is no net torque • There is no net force.
Conditions for Equilibrium • The sum of the forces must equal zero. • ΣF = F1 + F2 – FF = 0 • ΣF = m1g + m2g – FF = 0 • The sum of the torques must equal zero. • Σ = F1d1 + F2d2 = 0
FF F1 F2 Translational Equilibrium • The sum of the forces must equal zero. • ΣF = F1 + F2 – FF = 0 • ΣF = m1g + m2g – FF = 0
d1 d2 F1 F2 Rotational Equilibrium • The sum of the torques must equal zero. • Σ = F1d1 + F2d2 = 0 • Note that one torque will provide a rotational force in the counterclockwise direction (F1) while the other force will provide a rotational force in the clockwise direction (F2)
Center of Mass Center of Mass • If the fulcrum (pivot point) does not occur at the center of the object, then the center of mass must be factored into the problem. • For uniform geometric shapes, the center of mass can be conveniently chosen at the center of the object.
Center of mass of board relative to the fulcrum. d1 d2 dB1 dB2 F1 FB1 F2 FB2 When the Fulcrum is not in the Center • Σ = F1d1 + F2d2 + FB1dB1 + FB2dB2 = 0
Solving Problems involving Torque • Select the object to which the equations for equilibrium are to be applied. • Draw a free-body diagram that shows all of the external forces acting on the object. • Choose a convenient set of x, y axes and resolve all forces into components that lie along these axes. • Apply the equations that specify the balance of forces at equilibrium. (Set the net force in the x and y directions equal to zero.) • Select a convenient axis of rotation. Set the sum of the torques about this axis equal to zero. • Solve the equations for the desired unknown quantities.
Example 1: A Diving Board A woman whose weight is 530 N is poised at the right end of a diving board with length 3.90 m. The board has negligible weight and is supported by a fulcrum 1.40 m away from the left end. Find the forces that the bolt and the fulcrum exert on the board.
Torque Applied to Mobiles • The mobile can be looked at as a balance of forces in motion. • The forces of nature – wind and gravity – play a significant role in understanding how mobiles function.
Torque and Mobiles Σ = 0 FS FM FE