Download
1 / 6
70 likes | 209 Views
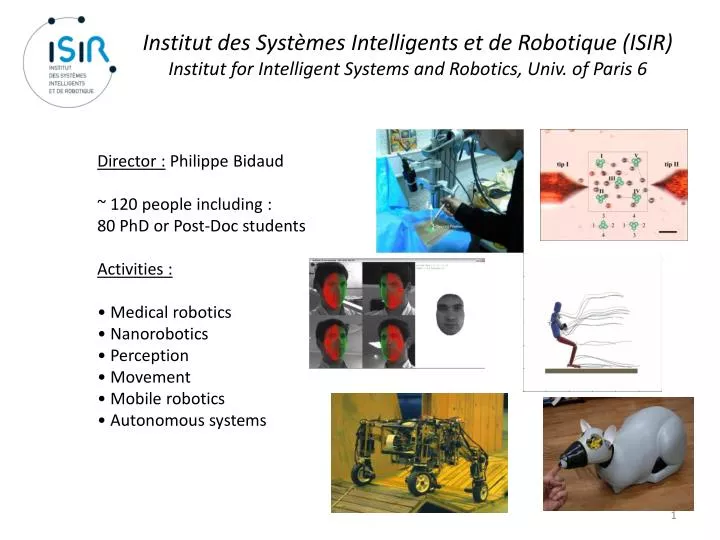
Institut des Systèmes Intelligents et de Robotique (ISIR) Institut for Intelligent S ystems and Robotics , Univ . of Paris 6. Director : Philippe Bidaud ~ 120 people including : 80 PhD or Post-Doc students Activities : Medical robotics Nanorobotics Perception Movement

E N D
Institut des Systèmes Intelligents et de Robotique (ISIR) Institut for Intelligent Systems and Robotics, Univ. of Paris 6 • Director: Philippe Bidaud • ~ 120 people including : • 80 PhD or Post-Doc students • Activities : • Medicalrobotics • Nanorobotics • Perception • Movement • Mobile robotics • Autonomoussystems
Assistance aux Gestes et Applications THerapeutiquE(AGATHE) • AssistiveRobotics for Medical and TherapeuticsApplications • ~25 people including : • 3 associateprofessors • 6 assistant professors • 3 surgeons • General purpose : design and control of roboticdevicesdevoted to humangesture and movement assistance • Main application topics: • Postural analysis and rehabilitation • Neuro-rehabilitation for humanupper-limb • Serial and parallelcomanipulation for medical/surgical applications • Force-based control of human/tool/organinteractions
Postural analysis and rehabilitation Method for postural stabilitymodeling • Robust reconstruction of lowerlimbjoint movements and efforts • Responseanalysis to 3D disturbances • Analysis of synergies in the control of lowerlimbs Assistance to walking and sit-and-stand (seevideo) • Intuitive control using the user’sintentionalmovements • Trajectory adaptation to the patient pathology: • By observing synergies during standard rehabilitation • By iterativelearning Joint position measurment Muscularactivitymeasurment Foot-ground interaction measurment Motorized postural Platform
Neuro-rehabilitation of humanupper-limb Transparencyoriented design of an exoskeleton • Hyperstaticityreduction : the arm/robot interface providesadditionalmobilities. • Force sensorsintergration and distributed force controlof the exoskeleton Upperlimbrehabilitation(seevideo) • Method for evaluatingvariouscomanipulation modes using forces and movementanalysis.
Serial and parallelcomanipulationfor medical/surgicalapplications Medicalimaging and parallelcomanipulation • Active guidance of instrument based on real time medicalimaging • Exploitation of underactuatedsystems Dexterous instrumentation for laparoscopy(seevideo) • Study of hand-tool-eye coordination under indirect vision • Gestureanalysis for kinematic and handle optimal design • Postural analysis for improment of global ergonomy
Force and vision-basedcontrol of human/tool/organ interactions Comanipulation for interface dynamics adaptation • Programmedimpedance of the hand-tool interaction • Force reconstruction and haptic feedback usingreal-time imaging of organdeformation Virtual fixturesobtainedusing local 3D imaging(seevideo) • Gesture guidance in case of hightool-environment interaction forces • Physiologicalmovements compensation