Download
1 / 4
40 likes | 78 Views
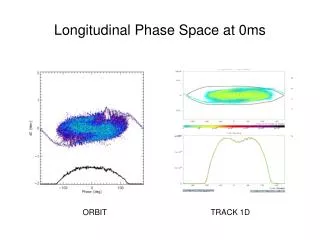
3. Phase Space Methods. 3.1 Determinism: Uniqueness in phase space

E N D
3. Phase Space Methods • 3.1 Determinism: Uniqueness in phase space • We Assume that the system is linear stochastic or non linear deterministic. For a purely deterministic system, it is important to establish a vector space such that specifying a point in the space specifies the state of the system and vice versa. The dynamical systems are usually defined by the set of differential equations. • The concept of state is very powerful in the case of nondeterministic systems. They are usually described by a set of states and transition rules ( in the form of transition probabilities). • EX : Markov Process • Main Feature: The essential feature of these features processes is their strictly finite memory : the transition probabilities depend on the present state and not on the past states. • A purely deterministic process is the limiting case of Markov Process.
3. Phase Space Methods • If phase space is finite dimensional vector space R^m, the dynamics are described by am m dimensional map or by m first – order differential equations. • Xn+1 = F(Xn) • For continuous case : • d/dt X(t) = f (X(t)) • This situation is usually referred to as a flow. • The vector field f is defined not to depend on time and thus is called ‘autonomous’. • If f contains explicit time dependence, the system is no more dynamical since time invariance is broken. • The system may be made autonomous by introducing additional degrees of freedom.
3. Phase Space Methods • In autonomous case thesolution to theinitial value is known to exist and unique if the vector field is Lipshitz Continuous. • Lipshitz Continuous: A function is Lipschitz continuous if it statisfoes Lipshitz condition for a finite constant C. • Lipshitz Condition: A mapping f: X Y between metric spaces is said to satisfy Lipshitz condition if there exists a real constant C • dy ( f(p), f(q) ) <= C dx (p, q) • Trajectory: A sequence of points Xn solving the above equation is called ‘trajectory of the dynamical system’. • Typical trajectories will run away to infinite or stay bounded as time proceeds. The observed behavior depends on form of F and initial conditions. • Basin of attraction: The set of initial conditions leading to the same asymptotic behavior of the trajectory is called ‘basin of attraction’ for particular motion.
3. Phase Space Methods • For an autonomous system with two degrees of freedom and continuous time, there are only 2 possibilities: a) Fixed point and b) limit cycle. • For flows in at least three dimensions, the method of stretching and folding can produce chaos. • 3.2 : DELAY RECONSTRUCTION • The attractor formed by Sn is equivalent to the attractor of unknown space in the original system if dimension m of delay coordinate space is twice the box counting dimension DF of the attractor. • 3.3: FINIDING A GOOD EMBEDDING: • m * tau is the most important embedding parameter. • False Neighbours: A method for determining the smallest dimension for embedding. • mutual information is used to find appropriate time lag.