Download
1 / 45
460 likes | 620 Views
ARM from NXT NXC Programming. Overview. NXT Hardware Programming Languages Using the NXT Demo Robots. NXT – What you see. 4 Inputs (digital & analog) 3 Outputs (support for encoders) Screen (100x64 pixels) 4 Buttons Sound USB and Bluetooth. Processors. Main processor:

E N D
Overview • NXT Hardware • Programming Languages • Using the NXT • Demo Robots
NXT – What you see • 4 Inputs (digital & analog) • 3 Outputs (support for encoders) • Screen (100x64 pixels) • 4 Buttons • Sound • USB and Bluetooth
Processors • Main processor: • Atmel 32-bit ARM processor, AT91SAM7S256 • 256 KB FLASH • 64 KB RAM • 48 MHz • Co-processor: • Atmel 8-bit AVR processor, ATmega48 • 4 KB FLASH • 512 Byte RAM • 8 MHz
Bluetooth and USB communication • Bluetooth wireless communication CSR BlueCoreTM 4 v2.0 +EDR System • Supports the Serial Port Profile (SPP) • Internal 47 KByte RAM • External 8 MBit FLASH • 26 MHz • USB 2.0 Full speed com port (12 Mbit/s)
Graphics, Sound, etc • Display 100 x 64 pixel LCD black & white graphical display • Loudspeaker Sound output channel with 8-bit resolution • Sample rate of 2-16 KHz • 4 Buttons
Misc. • 3 output ports 6-wire interface supporting input from encoders • 4 input ports 6-wire interface supporting I2C as well as analog • 1 high speed port, IEC 61158 Type 4/EN 50170 compliant • JTag debugging pins if you want them • LEGO has released technical specifications for all this
Online Documentation • http://mindstorms.lego.com/ - click on “NXTreme” button for information and downloads for advanced users • Open source firmware!!! • SDK – Software Developer Kit • HDK – Hardware Developer Kit • BDK – Bluetooth Developer Kit
Motors • Biggest improvement over RCX – rotation counters built in • 360 counts per rotation • They are relative, not absolute positions • Maximum speed is approx. 200 RPM • Motors are much stronger than the other, older LEGO motors
Sensors • Digital ultrasonic sensor (3cm-100cm) • Light sensor – can control LED • Sound sensor – DB and DBA • Touch sensor - binary
Conversion cable • LEGO has a conversion cable that allows you to use the sensors and motors of the RCX on the NXT • And vice versa, but you can’t use the ultrasonic sensor on the RCX, and the motors won’t have encoder support
Wires • The LEGO NXT wires have odd ends (like the DEC RJ-12 connector, but backwards) • Wiring diagrams: Analog input
3rd Party Sensors • Prices from $30 to $50 (so far) • HiTechnic (www.HiTechnic.com) • Packaging like LEGO sensors • Authorized by LEGO • MindSensors (www.MindSensors.com) • Circuit boards with connectors
HiTechnic Sensors • Color Sensor • Compass Sensor • Acceleration Sensor • More coming… • Prototype board • Gyro sensor (analog, not I2C digital) • IR Link (to talk to RCX and other LEGO IR devices) • IR Seeker (for robo soccer, for example) • No-contact touch sensor (electrostatic sensor) • Motor Multiplexor • Sensor Multiplexor
MindSensors Sensors • Acceleration Sensor • RCX to NXT communications link • PS2 controller interface • Motor Multiplexor • Magnetic Compass • Pneumatic Pressure Sensor
Bluetooth • One way to download programs • Can send files from one NXT to another • Allows up to four NXTs to talk with each other • One master, three slaves • Can use a phone as a remote control for your NXT • Other devices may be supported
Programming Languages • NXT-G code • NXC (and NBC) • Robot C • pbLua • Java and others
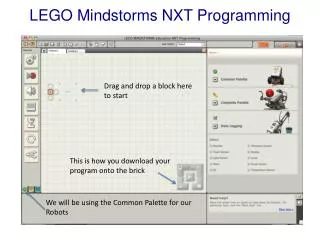
NXT-G code • LEGO’s development environment • Graphical programming • Based on National Instruments’ LabView • Great for quick programs • Wonderful for kids to use … but a real pain for old geezers like me who grew up with text programming languages
NXC (and NBC) • NXC (Not eXactly C) is a language similar to NQC, which was the most popular way to program the RCX • Built on NBC, the Next Byte Code ‘assembler’ • Uses the built in firmware, and p-code system
NXC uses BricxCC • Reasonably stable development environment • Provides support for all LEGO robotic platforms • Free!
Robot C • Carnegie Mellon’s programming language for various robotic platforms (including VEX, RCX, as well as NXT) • Requires new firmware • Not free (free trial, $30 download)
pbLua • New firmware, and language • Small portable language for embedded systems • By Ralph Hemple, the author of pbForth for the RCX • Compiles on brick! • Use any terminal device to talk to it
Other languages • Java and several other languages are reportedly in the works as well • MS Robotic Studio also supports the NXT • Download a small client program to NXT • Actual control is on a PC
Programming with NXC Assuming you are comfortable with C… • How to use the motors • How to read the sensors • Threading model
NXC Programs • NXC is based on C • Restrictions because it’s based on the built-in P-Code system • There’s no stack • Limited memory • Limited number of tasks (256) • And subroutines, which are also ‘tasks’
NXC program skeleton #include "NXCDefs.h" task main() { }
NXC Sensors L,klk" task main() { SetSensorType( IN_1, SENSOR_TYPE_TOUCH ); SetSensorMode( IN_1, SENSOR_MODE_BOOL ); }
NXC Sensors #include "NXCDefs.h" task main() { SetSensor( IN_1, SENSOR_TOUCH ); }
NXC Sensors • To read a sensor use x = Sensor( IN_1 );
NXC Sample program #include "NXCDefs.h“ task main() { SetSensor( IN_1, SENSOR_TOUCH ); while( true ) { if( Sensor( IN_1 ) ) { PlayToneEx(440, 100, 3, false); TextOut( 0, LCD_LINE1, "TOUCHING!"); while( Sensor( IN_1 ) ) ; } TextOut( 0, LCD_LINE1, "---------"); while( !Sensor( IN_1 ) ) ; } }
NXC Motors • Simple motor commands are available • OnFwd(), OnRev(), Off(), Float()
NXC Motors • To use the built-in rotation sensors, you need to use the new motor commands • Easiest to use is RotateMotor()
RotateMotor • RotateMotor( port, speed, angle ); • port is OUT_A, OUT_B, OUT_C, or combinations such as OUT_AB, OUT_ABC • speed is a number -100 to 100 • angle is the number of degrees you want the motor to turn (positive or negative)
Mimicking a Servo Motor • Read the current motor angle • Current = MotorRotationCount( OUT_A ); • Calculate how far you need to turn • Delta = Target – Current; • Turn that amount • RotateMotor( OUT_A, speed, Delta );
Displaying Text • The LCD display is useful for • Debugging • Setting parameters • Runtime messages • Graphics • Games • … and more
Displaying Text • TextOut( x, y, text ); • NumOut( x, y, number );
LCD display • The origin is the bottom left • So TextOut( 0,0, “hi” ) will display in the bottom left corner • Use the LCD_LINEn macros if you like to make it easier
Text Example y = 42; TextOut(0, LCD_LINE5, "Answer:" ); NumOut( 8*6, LCD_LINE5, y ); // characters are 6 pixels wide
Graphics • There are also commands to draw lines, circles, rectangles, and set points • You can display bitmaps from a file • RIC files – contain drawing commands • One problem is there isn’t an easy way to clear areas of the screen • It’s easy to clear the whole screen • You can display a 1x1 blank bitmap
Tasks and Subroutines • Multiple tasks are possible, but don’t work like you might expect • Scheduling is different – tasks start when a ‘dependant’ task finishes • There is no easy way of stopping a task • Use Precedes() or Follows() in a task to define task dependencies
Tasks task FooTask() { // will start executing when main() finishes } task main() { // program starts here Precedes( FooTask ); } task BarTask() { Follows( main ); // will also start executing when main() finishes }
Subroutines • Essentially a task that can be called • It suspends the calling task until it returns • Don’t use task keyword to define these • Can pass in parameters or return a value
Subroutine Example void TestSub( int x, int y, short i ) { x = y + i; } task main() { TestSub( 1, 2, 3 ); }
NXC Help • Preliminary help file is a PDF • There are many samples and a tutorial online
Demo Robots • Dog • 6-legged walker • Crane • Crate Dump truck • Others?