Download

1 / 10
100 likes | 326 Views
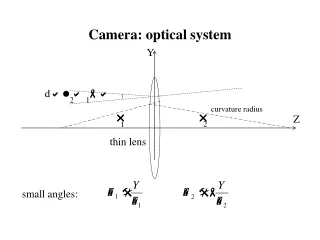
Projector-camera system. Application of computer vision. A Projector-Camera system. Projector-Camera calibration. Calibration method to find G p = (camera coordinate system to projector to transformation).

E N D
Projector-camera system Application of computer vision projector-camera v3a
A Projector-Camera system projector-camera v3a
Projector-Camera calibration projector-camera v3a
Calibration method to find Gp=(camera coordinate system to projector to transformation) • Project a point xp in projector image to the projection frustum and the calibrated camera captures the handheld moving plane (4 corners) and the projected point Xc. • The camera coordinate system is the world coord. Sys. • The 4 corners define the handheld plane for display (). • The captured image point of Xc is xc’, which defines the vector VXc from the camera center to the point Xc. • Intersection between and VXc is Xc, hence Xc can be found. • xp=Gp *Xc, so if enough points (>=6, typically 40) correspondences between Xc and xp are given Gp can be found. projector-camera v3a
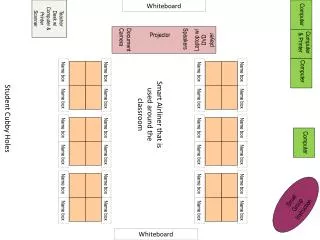
Our setup projector-camera v3a
Calibration procedure projector-camera v3a
Quadrangle tracking projector-camera v3a
Experiments projector-camera v3a
Projection result projector-camera v3a
Results projector-camera v3a