Download
1 / 41
530 likes | 862 Views
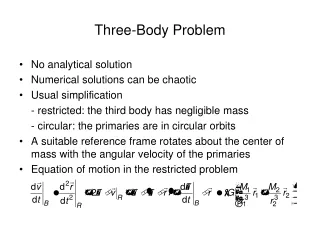
The Three-Body Problem. Context. Motivation and History Periodic solutions to the three-body problem The restricted three-body problem Runge-Kutta method Numerical simulation. Motivations and History. Motivations and History. People who formulated the problem and made great contributions:

E N D
Context • Motivation and History • Periodic solutions to the three-body problem • The restricted three-body problem • Runge-Kutta method • Numerical simulation
Motivations and History • People who formulated the problem and made great contributions: • Newton • Kepler • Euler • Poincaré
Motivations and History • Newton told us that two masses attract each other under the law that gives us the nonlinear system of second-order differential equations: • The two-body problem was analyzed by Johannes Kepler in 1609 and solved by Isaac Newton in 1687.
Motivations and History • There are many systems we would like to calculate. • For instance a flight of a spacecraft from the Earth to Moon, or flight path of a meteorite. • So we need to solve few bodies problem of interactions.
Motivations and History • In the mid-1890s Henri Poincaré showed that there could be no such quantities analytic in positions, velocities and mass ratios for N>2.
Motivations and History • In 1912 Karl Sundman found an infinite series that could in principle be summed to give the solution - but which converges exceptionally slowly. • Henri Poincaré identified very sensitive dependence on initial conditions. • And developed topology to provide a simpler overall description.
Periodic Solutions • Newton solved the two-body problem. The difference vectorx=x1-x2satisfies Kepler’sproblem: • All solutions are conics with one focus at the origin. • The Kepler constantkism1+m2 .
Periodic Solutions • Filling of a ring is everywhere dense
Periodic Solutions • The simplest periodic solutions for the three-body problem were discovered by Euler [1765] and by Lagrange [1772]. • Built out of Keplerian ellipses, they are the only explicit solutions.
Periodic Solutions • The Lagrange solutions arexi(t)=λ(t)xi0, • λ(t)C is any solution to the planar Kepler problem. • To form the Lagrange solution, start by placing the three masses at the vertices x10,x20, x30 of an equilateral triangle whose center of mass m1x10+m2x20+m3x30is the origin.
Periodic Solutions • Lagrange’s solution in the equal mass case
Periodic Solutions • Lagrange’s solution in the equal mass case
Periodic Solutions • The Euler solutions arexi(t)=λ(t)xi0, • λ(t)C is any solution to the planar Kepler problem. • To form the Euler solution, start by placing the three masses on the same line with their positions xi0 such that the ratios rij=rik of their distances are the roots of a certain polynomial whose coefficients depend on the masses.
Periodic Solutions • Euler’s solution in the equal mass case
Periodic Solutions • Most important to astronomy are Hill’s periodic solutions, also called tight binaries. • These model the earth-moon-sun system. Two masses are close to each other while the third remains far away.
Periodic Solutions • New periodic solution “figure eight”. • The eight was discovered numerically by Chris Moore [1993]. • A.Chenciner and R.Montgomery [2001] rediscovered it and proved its existence.
Periodic Solutions • The figure eight solution
Some examples the figure eight 19 on an 8 6 bodies, non-symmetric
Some examples 21 bodies 7 bodies on a flower
Some examples 8 bodies on daisy 4 bodies on a flower
Formulation of Problem • The restricted three-body problem. • The restricted problem is said to be a limit of the three-body problem as one of the masses tends to zero. Hamilton’s equations:
Runge-Kutta Method Abstract:First developed by the German mathematicians C.D.T. Runge and M.W. Kutta in the latter half of the nineteenth century. It is based on differenceschemes.
2nd order Runge-Kutta method : Cauchy problem: Let’s take Taylor of the solution :
We get: If we substitute derivatives for the differencederivatives, 0<β<1,yj+1is approximated solution.
Now if we take β=1/2, we obtain classical Runge-Kutta scheme of 2nd order. If we continue we obtain scheme of 4th order:
Method for the system of differential equations: Let’s denoteu’=v, .
If is a vector of approximations of the solution , at point xj, and are vectors of design factors, then:
Th.(error approximation in the RK method): εh(t1)=|yh(t1)-y(t1)|≈ 16/15∙|yh(t1)-yh/2(t1)| where εh is the error of calculations at the point t1 with mesh width h.
Numerical simulation • Numerical simulation is based on: • 4th order Runge-Kutta method • Adaptive stepsize control for Runge-Kutta • Program is developed in Delphi.
Numerical simulation Some obtained orbits
References • “A New Solution to the Three-Body Problem”, R. Montgomery • “Numerical methods”, E. Shmidt. • “Lekcii po nebesnoj mehanike”, V.M.Alekseev. • “Chislennie Metodi”, V.A. Buslov, S.L. Yakovlev. • “From the restricted to the full three-body problem”, Kenneth R., Meyer and Dieter S. Schmidt. • http://www.cse.ucsc.edu/~charlie/3body/, Charlie McDowell.


![[PDF] Free Download The Three-Body Problem By Cixin Liu & Ken Liu](https://cdn5.slideserve.com/10015030/slide1-dt.jpg)