Download
1 / 59
590 likes | 615 Views
This lecture discusses the synchronization issues in distributed shared memory systems and proposes solutions for achieving sequential consistency. It covers topics such as directory protocols, deadlock issues, reducing depth, two-level hierarchies, and organizing directories.

E N D
CS252Graduate Computer ArchitectureLecture 21April 11th, 2012Distributed Shared Memory (con’t)Synchronization Prof John D. Kubiatowicz http://www.cs.berkeley.edu/~kubitron/cs252
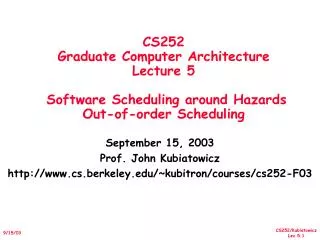
Req NACK Inv Ack Req Inv Ack WData Inv Ack Recall: Sequential Consistency of Directory Protocols • How to get exclusion zone for directory protocol? • Clearly need to make sure that invalidations really invalidate copies • Keep state to handle reordering at client (previous slide’s problem) • While acknowledgements outstanding, cannot handle read requests • NAK read requests • Queue read requests • Example for invalidation-based scheme: • block owner (home node) provides appearance of atomicity by waiting for all invalidations to be ack’d before allowing access to new value • As a result, write commit point becomes point at which WData leaves home node (after last ack received) • Much harder in update schemes! Reader Reader REQ HOME Reader
1 2 4a 3 3:interv ention 4b 2:interv ention 1: req 1: req 4a:re vise L H R L H R 2:reply 4:reply 3:response 4b:response 1 2 1: req 2:interv ention 4 3 3a:re vise L H R 3b:response Recall: Deadlock Issues with Protocols • Consider Dual graph of message dependencies • Nodes: Networks, Arcs: Protocol actions • Number of networks = length of longest dependency • Must always make sure response (end) can be absorbed! 2 Networks Sufficient to Avoid Deadlock Need 4 Networks to Avoid Deadlock 1 2 Need 3 Networks to Avoid Deadlock 3a 3b
Original: Need 3 Networks to Avoid Deadlock Optional NACK When blocked Need 2 Networks to 1: req 1: req 2:interv 2:interv ention ention 1 1 2 2 3a:re 3a:re vise vise L L H H R R 3 3 3b:response 3b:response Recall: Mechanisms for reducing depth X NACK 2:intervention 1: req 1 2’ Transform to Request/Resp: Need 2 Networks to 3a:re vise L H R 2’:SendInt To R 2 3a 3b:response 3a
A Popular Middle Ground • Two-level “hierarchy” • Individual nodes are multiprocessors, connected non-hiearchically • e.g. mesh of SMPs • Coherence across nodes is directory-based • directory keeps track of nodes, not individual processors • Coherence within nodes is snooping or directory • orthogonal, but needs a good interface of functionality • Examples: • Convex Exemplar: directory-directory • Sequent, Data General, HAL: directory-snoopy • SMP on a chip?
Advantages of Multiprocessor Nodes • Potential for cost and performance advantages • amortization of node fixed costs over multiple processors • applies even if processors simply packaged together but not coherent • can use commodity SMPs • less nodes for directory to keep track of • much communication may be contained within node (cheaper) • nodes prefetch data for each other (fewer “remote” misses) • combining of requests (like hierarchical, only two-level) • can even share caches (overlapping of working sets) • benefits depend on sharing pattern (and mapping) • good for widely read-shared: e.g. tree data in Barnes-Hut • good for nearest-neighbor, if properly mapped • not so good for all-to-all communication
Disadvantages of Coherent MP Nodes • Bandwidth shared among nodes • all-to-all example • applies to coherent or not • Bus increases latency to local memory • With coherence, typically wait for local snoop results before sending remote requests • Snoopy bus at remote node increases delays there too, increasing latency and reducing bandwidth • May hurt performance if sharing patterns don’t comply
Insight into Directory Requirements • If most misses involve O(P) transactions, might as well broadcast! Study Inherent program characteristics: • frequency of write misses? • how many sharers on a write miss • how these scale • Also provides insight into how to organize and store directory information
Sharing Patterns Summary • Generally, few sharers at a write, scales slowly with P • Code and read-only objects (e.g, scene data in Raytrace) • no problems as rarely written • Migratory objects (e.g., cost array cells in LocusRoute) • even as # of PEs scale, only 1-2 invalidations • Mostly-read objects (e.g., root of tree in Barnes) • invalidations are large but infrequent, so little impact on performance • Frequently read/written objects (e.g., task queues) • invalidations usually remain small, though frequent • Synchronization objects • low-contention locks result in small invalidations • high-contention locks need special support (SW trees, queueing locks) • Implies directories very useful in containing traffic • if organized properly, traffic and latency shouldn’t scale too badly • Suggests techniques to reduce storage overhead
Organizing Directories DirectorySchemes Centralized Distributed How to find source of directory information Flat Hierarchical How to locate copies Memory-based Cache-based
How to Find Directory Information • centralized memory and directory - easy: go to it • but not scalable • distributed memory and directory • flat schemes • directory distributed with memory: at the home • location based on address (hashing): network xaction sent directly to home • hierarchical schemes • ??
How Hierarchical Directories Work • Directory is a hierarchical data structure • leaves are processing nodes, internal nodes just directory • logical hierarchy, not necessarily phyiscal • (can be embedded in general network)
Find Directory Info (cont) • distributed memory and directory • flat schemes • hash • hierarchical schemes • node’s directory entry for a block says whether each subtree caches the block • to find directory info, send “search” message up to parent • routes itself through directory lookups • like hiearchical snooping, but point-to-point messages between children and parents
How Is Location of Copies Stored? • Hierarchical Schemes • through the hierarchy • each directory has presence bits child subtrees and dirty bit • Flat Schemes • vary a lot • different storage overheads and performance characteristics • Memory-based schemes • info about copies stored all at the home with the memory block • Dash, Alewife , SGI Origin, Flash • Cache-based schemes • info about copies distributed among copies themselves • each copy points to next • Scalable Coherent Interface (SCI: IEEE standard)
P M Flat, Memory-based Schemes • info about copies co-located with block at the home • just like centralized scheme, except distributed • Performance Scaling • traffic on a write: proportional to number of sharers • latency on write: can issue invalidations to sharers in parallel • Storage overhead • simplest representation: full bit vector, (called “Full-Mapped Directory”), i.e. one presence bit per node • storage overhead doesn’t scale well with P; 64-byte line implies • 64 nodes: 12.7% ovhd. • 256 nodes: 50% ovhd.; 1024 nodes: 200% ovhd. • for M memory blocks in memory, storage overhead is proportional to P*M: • Assuming each node has memory Mlocal= M/P, P2Mlocal • This is why people talk about full-mapped directories as scaling with the square of the number of processors
P M = MlocalP Reducing Storage Overhead • Optimizations for full bit vector schemes • increase cache block size (reduces storage overhead proportionally) • use multiprocessor nodes (bit per mp node, not per processor) • still scales as P*M, but reasonable for all but very large machines • 256-procs, 4 per cluster, 128B line: 6.25% ovhd. • Reducing “width” • addressing the P term? • Reducing “height” • addressing the M term?
Storage Reductions • Width observation: • most blocks cached by only few nodes • don’t have a bit per node, but entry contains a few pointers to sharing nodes • Called “Limited Directory Protocols” • P=1024 => 10 bit ptrs, can use 100 pointers and still save space • sharing patterns indicate a few pointers should suffice (five or so) • need an overflow strategy when there are more sharers • Height observation: • number of memory blocks >> number of cache blocks • most directory entries are useless at any given time • Could allocate directory from pot of directory entries • If memory line doesn’t have a directory, no-one has copy • What to do if overflow? Invalidate directory with invaliations • organize directory as a cache, rather than having one entry per memory block
Case Study: Alewife Architecture • Cost Effective Mesh Network • Pro: Scales in terms of hardware • Pro: Exploits Locality • Directory Distributed along with main memory • Bandwidth scales with number of processors • Con: Non-Uniform Latencies of Communication • Have to manage the mapping of processes/threads onto processors due • Alewife employs techniques for latency minimization and latency tolerance so programmer does not have to manage • Context Switch in 11 cycles between processes on remote memory request which has to incur communication network latency • Cache Controller holds tags and implements the coherence protocol
LimitLESS Protocol (Alewife) • Limited Directory that is Locally Extended through Software Support • Handle the common case (small worker set) in hardware and the exceptional case (overflow) in software • Processor with rapid trap handling (executes trap code within 4 cycles of initiation) • State Shared • Processor needs complete access to coherence related controller state in the hardware directories • Directory Controller can invoke processor trap handlers • Machine needs an interface to the network that allows the processor to launch and intercept coherence protocol packets
The Protocol • Alewife: p=5-entry limited directory with software extension (LimitLESS) • Read-only directory transaction: • Incoming RREQ with n p Hardware memory controller responds • If n > p: send RREQ to processor for handling
Transition to Software • Trap routine can either discard packet or store it to memory • Store-back capability permits message-passing and block transfers • Potential Deadlock Scenario with Processor Stalled and waiting for a remote cache-fill • Solution: Synchronous Trap (stored in local memory) to empty input queue
Transition to Software (Con’t) • Overflow Trap Scenario • First Instance: Full-Map bit-vector allocated in local memory and hardware pointers transferred into this and vector entered into hash table • Otherwise: Transfer hardware pointers into bit vector • Meta-State Set to “Trap-On-Write” • While emptying hardware pointers, Meta-State: “Trans-In-Progress” • Incoming Write Request Scenario • Empty hardware pointers to memory • Set AckCtr to number of bits that are set in bit-vector • Send invalidations to all caches except possibly requesting one • Free vector in memory • Upon invalidate acknowledgement (AckCtr == 0), send Write-Permission and set Memory State to “Read-Write”
Flat, Cache-based Schemes • How they work: • home only holds pointer to rest of directory info • distributed linked list of copies, weaves through caches • cache tag has pointer, points to next cache with a copy • on read, add yourself to head of the list (comm. needed) • on write, propagate chain of invals down the list • Scalable Coherent Interface (SCI) IEEE Standard • doubly linked list
Scaling Properties (Cache-based) • Traffic on write: proportional to number of sharers • Latency on write: proportional to number of sharers! • don’t know identity of next sharer until reach current one • also assist processing at each node along the way • (even reads involve more than one other assist: home and first sharer on list) • Storage overhead: quite good scaling along both axes • Only one head ptr per memory block • rest is all prop to cache size • Very complex!!!
Summary of Directory Organizations • Flat Schemes: • Issue (a): finding source of directory data • go to home, based on address • Issue (b): finding out where the copies are • memory-based: all info is in directory at home • cache-based: home has pointer to first element of distributed linked list • Issue (c): communicating with those copies • memory-based: point-to-point messages (perhaps coarser on overflow) • can be multicast or overlapped • cache-based: part of point-to-point linked list traversal to find them • serialized • Hierarchical Schemes: • all three issues through sending messages up and down tree • no single explict list of sharers • only direct communication is between parents and children
Summary of Directory Approaches • Directories offer scalable coherence on general networks • no need for broadcast media • Many possibilities for organizing directory and managing protocols • Hierarchical directories not used much • high latency, many network transactions, and bandwidth bottleneck at root • Both memory-based and cache-based flat schemes are alive • for memory-based, full bit vector suffices for moderate scale • measured in nodes visible to directory protocol, not processors • will examine case studies of each
Role of Synchronization • Types of Synchronization • Mutual Exclusion • Event synchronization • point-to-point • group • global (barriers) • How much hardware support? • high-level operations? • atomic instructions? • specialized interconnect?
Components of a Synchronization Event • Acquire method • Acquire right to the synch • enter critical section, go past event • Waiting algorithm • Wait for synch to become available when it isn’t • busy-waiting, blocking, or hybrid • Release method • Enable other processors to acquire right to the synch • Waiting algorithm is independent of type of synchronization • makes no sense to put in hardware
Strawman Lock lock: ld register, location/* copy location to register */ cmp location, #0/* compare with 0 */ bnz lock/* if not 0, try again */ st location, #1/* store 1 to mark it locked */ ret/* return control to caller */ unlock: st location, #0/* write 0 to location */ ret/* return control to caller */ Busy-Wait Why doesn’t the acquire method work? Release method?
What to do if only load and store? • Here is a possible two-thread solution: Thread AThread B Set A=1; Set B=1; while (B) {//X if (!A) {//Y do nothing; Critical Section; } } Critical Section; Set B=0; Set A=0; • Does this work? Yes. Both can guarantee that: • Only one will enter critical section at a time. • At X: • if B=0, safe for A to perform critical section, • otherwise wait to find out what will happen • At Y: • if A=0, safe for B to perform critical section. • Otherwise, A is in critical section or waiting for B to quit • But: • Really messy • Generalization gets worse
Atomic Instructions • Specifies a location, register, & atomic operation • Value in location read into a register • Another value (function of value read or not) stored into location • Many variants • Varying degrees of flexibility in second part • Simple example: test&set • Value in location read into a specified register • Constant 1 stored into location • Successful if value loaded into register is 0 • Other constants could be used instead of 1 and 0 • How to implement test&set in distributed cache coherent machine? • Wait until have write privileges, then perform operation without allowing any intervening operations (either locally or remotely)
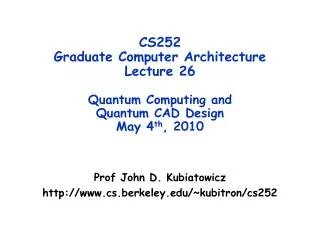
20 l T est&set, c = 0 s s T est&set, exponential backof f, c = 3.64 l s 18 T est&set, exponential backof f, c = 0 n n Ideal u s 16 s l s s 14 n l l s s n 12 s s) n l m s s ime ( s l 10 l T n l s n n 8 n l 6 n l n 4 l n s l l 2 n l s uuuuuuuuuuuuuuu l n n n n s u l 0 3 5 7 9 11 13 15 Number of processors T&S Lock Microbenchmark: SGI Chal. lock: t&s register, location bnz lock /* if not 0, try again */ ret /* return control to caller */ unlock: st location, #0 /* write 0 to location */ ret /* return control to caller */ lock; delay(c); unlock;
Zoo of hardware primitives • test&set (&address) { /* most architectures */ result = M[address]; M[address] = 1; return result;} • swap (&address, register) { /* x86 */ temp = M[address]; M[address] = register; register = temp;} • compare&swap (&address, reg1, reg2) { /* 68000 */ if (reg1 == M[address]) { M[address] = reg2; return success; } else { return failure; }} • load-linked&store conditional(&address) { /* R4000, alpha */ loop: ll r1, M[address]; movi r2, 1; /* Can do arbitrary comp */ sc r2, M[address]; beqz r2, loop;}
Mini-Instruction Set debate • atomic read-modify-write instructions • IBM 370: included atomic compare&swap for multiprogramming • x86: any instruction can be prefixed with a lock modifier • High-level language advocates want hardware locks/barriers • but it’s goes against the “RISC” flow,and has other problems • SPARC: atomic register-memory ops (swap, compare&swap) • MIPS, IBM Power: no atomic operations but pair of instructions • load-locked, store-conditional • later used by PowerPC and DEC Alpha too • 68000: CCS: Compare and compare and swap • No-one does this any more • Rich set of tradeoffs
Other forms of hardware support • Separate lock lines on the bus • Lock locations in memory • Lock registers (Cray Xmp,Intel Single-Chip CC) • Hardware full/empty bits (Tera, Alewife) • QOLB (machines supporting SCI protocol) • Bus support for interrupt dispatch
Enhancements to Simple Lock • Reduce frequency of issuing test&sets while waiting • Test&set lock with backoff • Don’t back off too much or will be backed off when lock becomes free • Exponential backoff works quite well empirically: ith time = k*ci • Busy-wait with read operations rather than test&set • Test-and-test&set lock • Keep testing with ordinary load • cached lock variable will be invalidated when release occurs • When value changes (to 0), try to obtain lock with test&set • only one attemptor will succeed; others will fail and start testing again
Busy-wait vs Blocking • Busy-wait: I.e. spin lock • Keep trying to acquire lock until read • Very low latency/processor overhead! • Very high system overhead! • Causing stress on network while spinning • Processor is not doing anything else useful • Blocking: • If can’t acquire lock, deschedule process (I.e. unload state) • Higher latency/processor overhead (1000s of cycles?) • Takes time to unload/restart task • Notification mechanism needed • Low system overheadd • No stress on network • Processor does something useful • Hybrid: • Spin for a while, then block • 2-competitive: spin until have waited blocking time
Improved Hardware Primitives: LL-SC • Goals: • Test with reads • Failed read-modify-write attempts don’t generate invalidations • Nice if single primitive can implement range of r-m-w operations • Load-Locked (or -linked), Store-Conditional • LL reads variable into register • Follow with arbitrary instructions to manipulate its value • SC tries to store back to location • succeed if and only if no other write to the variable since this processor’s LL • indicated by condition codes; • If SC succeeds, all three steps happened atomically • If fails, doesn’t write or generate invalidations • must retry aquire
Simple Lock with LL-SC lock: ll reg1, location/* LL location to reg1 */ sc location, reg2/* SC reg2 into location*/ beqz reg2, lock/* if failed, start again */ ret unlock: st location, #0/* write 0 to location */ ret • Can do more fancy atomic ops by changing what’s between LL & SC • But keep it small so SC likely to succeed • Don’t include instructions that would need to be undone (e.g. stores) • SC can fail (without putting transaction on bus) if: • Detects intervening write even before trying to get bus • Tries to get bus but another processor’s SC gets bus first • LL, SC are not lock, unlock respectively • Only guarantee no conflicting write to lock variable between them • But can use directly to implement simple operations on shared variables
Ticket Lock • Only one r-m-w per acquire • Two counters per lock (next_ticket, now_serving) • Acquire: fetch&inc next_ticket; wait for now_serving == next_ticket • atomic op when arrive at lock, not when it’s free (so less contention) • Release: increment now-serving • Performance • low latency for low-contention - if fetch&inc cacheable • O(p) read misses at release, since all spin on same variable • FIFO order • like simple LL-SC lock, but no inval when SC succeeds, and fair • Backoff? • Wouldn’t it be nice to poll different locations ...
Array-based Queuing Locks • Waiting processes poll on different locations in an array of size p • Acquire • fetch&inc to obtain address on which to spin (next array element) • ensure that these addresses are in different cache lines or memories • Release • set next location in array, thus waking up process spinning on it • O(1) traffic per acquire with coherent caches • FIFO ordering, as in ticket lock, but, O(p) space per lock • Not so great for non-cache-coherent machines with distributed memory • array location I spin on not necessarily in my local memory • Example: MCS lock (Mellor-Crummey and Scott)
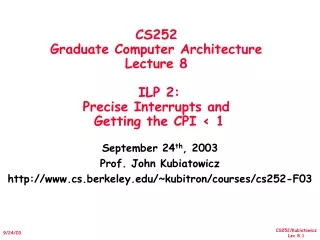
A r r a y - b a s e d l L L - S C 6 L L - S C , e x p o n e n t i a l n T i c k e t u T i c k e t , p r o p o r t i o n a l s 7 7 7 u u u u u u u 6 6 6 6 u u u u u u u u u u u 6 u 6 5 5 5 u u 6 l u u u l u u u 6 l l 6 l l u u 6 l l 6 l l l u l u l l l 6 l 6 l 4 4 4 l l l l l 6 l u l l l l l s 6 u l s l s l l l s u s l l l s s l l u 6 s l l s s l 6 u s u s n s s s 6 s s 6 s s Time (s) s Time (s) Time (s) s s s s s u s s s s u u 6 s s s s s s s n s s s 6 s n 6 3 3 3 n 6 n 6 n n 6 n n n n n n n 6 n 6 6 6 6 n n 2 2 2 6 n 6 n 6 6 n n 6 u s 6 n 6 6 n 6 6 n 6 n n 6 n n n 6 u n 1 1 n 1 n l n s n 6 n n s n 6 n s n n n l n s n u l l 6 n n u 6 u 6 0 0 0 1 3 5 7 9 1 1 1 3 1 5 1 3 5 7 9 1 1 1 3 1 5 1 3 5 7 9 1 1 1 3 1 5 Number of processors Number of processors Number of processors (a) Null (c = 0, d = 0) (c) Delay (c = 3.64 s, d = 1.29 s) (b) Critical-section (c = 3.64 s, d = 0) Lock Performance on SGI Challenge Loop: lock; delay(c); unlock; delay(d);
Point to Point Event Synchronization • Software methods: • Interrupts • Busy-waiting: use ordinary variables as flags • Blocking: use semaphores • Full hardware support: full-empty bit with each word in memory • Set when word is “full” with newly produced data (i.e. when written) • Unset when word is “empty” due to being consumed (i.e. when read) • Natural for word-level producer-consumer synchronization • producer: write if empty, set to full; consumer: read if full; set to empty • Hardware preserves atomicity of bit manipulation with read or write • Problem: flexibility • multiple consumers, or multiple writes before consumer reads? • needs language support to specify when to use • composite data structures?
Barriers • Software algorithms implemented using locks, flags, counters • Hardware barriers • Wired-AND line separate from address/data bus • Set input high when arrive, wait for output to be high to leave • In practice, multiple wires to allow reuse • Useful when barriers are global and very frequent • Difficult to support arbitrary subset of processors • even harder with multiple processes per processor • Difficult to dynamically change number and identity of participants • e.g. latter due to process migration • Not common today on bus-based machines
A Simple Centralized Barrier • Shared counter maintains number of processes that have arrived • increment when arrive (lock), check until reaches numprocs • Problem? struct bar_type {int counter; struct lock_type lock; int flag = 0;} bar_name; BARRIER (bar_name, p) { LOCK(bar_name.lock); if (bar_name.counter == 0) bar_name.flag = 0; /* reset flag if first to reach*/ mycount = bar_name.counter++; /* mycount is private */ UNLOCK(bar_name.lock); if (mycount == p) { /* last to arrive */ bar_name.counter = 0; /* reset for next barrier */ bar_name.flag = 1; /* release waiters */ } else while (bar_name.flag == 0) {}; /* busy wait for release */ }
A Working Centralized Barrier • Consecutively entering the same barrier doesn’t work • Must prevent process from entering until all have left previous instance • Could use another counter, but increases latency and contention • Sense reversal: wait for flag to take different value consecutive times • Toggle this value only when all processes reach BARRIER (bar_name, p) { local_sense = !(local_sense); /* toggle private sense variable */ LOCK(bar_name.lock); mycount = bar_name.counter++; /* mycount is private */ if (bar_name.counter == p) UNLOCK(bar_name.lock); bar_name.flag = local_sense; /* release waiters*/ else { UNLOCK(bar_name.lock); while (bar_name.flag != local_sense) {}; } }
Centralized Barrier Performance • Latency • Centralized has critical path length at least proportional to p • Traffic • About 3p bus transactions • Storage Cost • Very low: centralized counter and flag • Fairness • Same processor should not always be last to exit barrier • No such bias in centralized • Key problems for centralized barrier are latency and traffic • Especially with distributed memory, traffic goes to same node