Download
1 / 43

E N D
1. eZ430X
2. BYU CS/ECEn 124 BYU eZ430X 2 Topics to Cover� MSPF2274
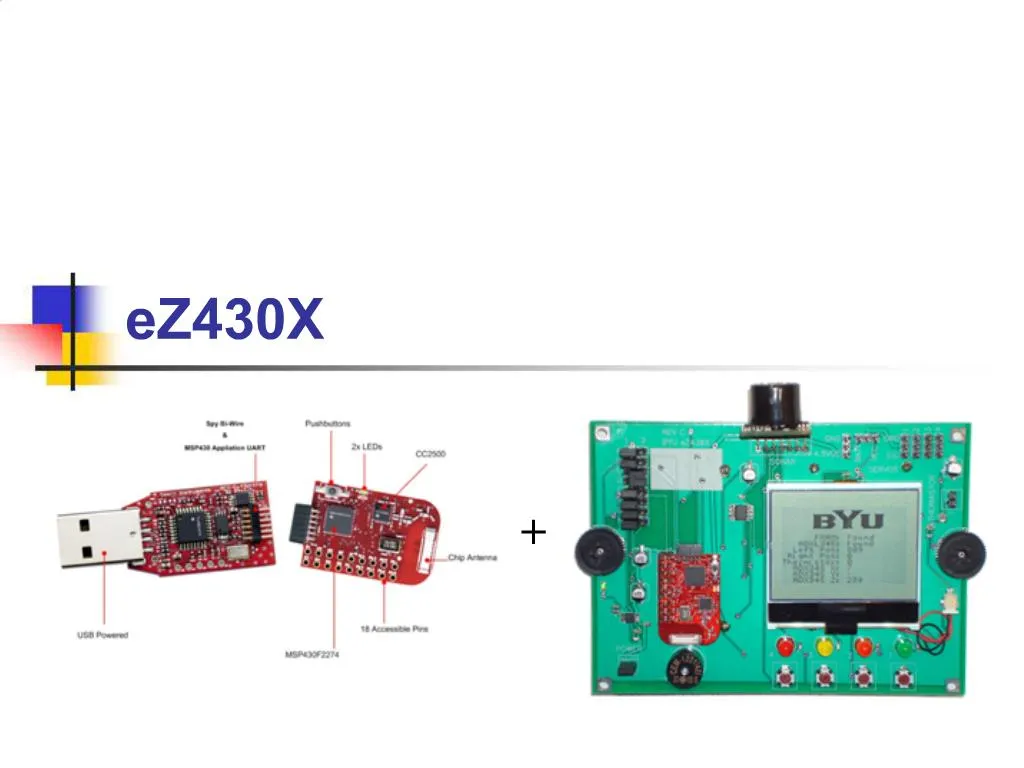
eZ430X Development Board
Peripherals
Peripheral Devices
Low Pass Filter
Headers
Jumpers
Lab 7: Simon
Coding Assembler
3. BYU CS/ECEn 124 BYU eZ430X 3 MSP430 Typical Applications
4. BYU CS/ECEn 124 BYU eZ430X 4 MSP430 Roadmap
5. BYU CS/ECEn 124 BYU eZ430X 5 IMPORTANT!!!
6. BYU CS/ECEn 124 BYU eZ430X 6 MSP430F2274
7. BYU CS/ECEn 124 BYU eZ430X 7 eZ430X Development Board
8. BYU CS/ECEn 124 BYU eZ430X 8 eZ430X Development Board
9. BYU CS/ECEn 124 BYU eZ430X 9 Computrol Facilities
10. BYU CS/ECEn 124 BYU eZ430X 10 Printed Circuit Boards
11. BYU CS/ECEn 124 BYU eZ430X 11 Apply Solder Paste
12. BYU CS/ECEn 124 BYU eZ430X 12 Robots Place Parts
13. BYU CS/ECEn 124 BYU eZ430X 13 Discrete Parts Added
14. BYU CS/ECEn 124 BYU eZ430X 14 Flow Soldered
15. BYU CS/ECEn 124 BYU eZ430X 15 276? Solder Bath
16. BYU CS/ECEn 124 BYU eZ430X 16 Final Inspection
17. BYU CS/ECEn 124 BYU eZ430X 17 Peripherals A/D Converter (ADC10)
Operational Amps (OA0-3) (Not covered)
Ports (P1-P4)
Power Module
Digitally Controlled Oscillator (DCO)
Very Low Frequency Oscillator (VLO)
Timers A/B
USCI A/B
USART � Universal Serial Asynchronous Rx/Tx
SPI � Serial Peripheral Interface
i2c � Inter-Integrated Circuit
Watchdog+
18. BYU CS/ECEn 124 BYU eZ430X 18 ADC10
19. BYU CS/ECEn 124 BYU eZ430X 19 Digital I/O
20. BYU CS/ECEn 124 BYU eZ430X 20 Timer_A/B
21. BYU CS/ECEn 124 BYU eZ430X 21 USART Serial Port
22. BYU CS/ECEn 124 BYU eZ430X 22 I2c � Inter-Integrated Circuit Inter-Integrated Circuit
2-wire serial interface (Serial data SDA, Serial clock SCL)
master/slave (slaves have unique 7-bit address)
100-400 kbit/sec (relatively slow)
Master provides clock
23. BYU CS/ECEn 124 BYU eZ430X 23 Watchdog Timer
24. BYU CS/ECEn 124 BYU eZ430X 24 Peripheral Devices Switches (Push Buttons)
LED�s (2 + 4)
LCD (100 x 160 pixels)
FRAM (8 kb)
LCD Backlight
Potentiometers (Left & Right)
Thermistor (10k ?)
Accelerometer (3-axis ADXL345)
Sonar Transponder (Optional)
25. BYU CS/ECEn 124 BYU eZ430X 25 Switches Switches
P2.0-3
Internal pull-ups
Require debouncing
26. BYU CS/ECEn 124 BYU eZ430X 26 LED�s LED�s
P2.0-1, P3.3, P4.6
Use PWM for brightness
0 = OFF, 1 = ON
27. BYU CS/ECEn 124 BYU eZ430X 27 LCD LCD - 100 x 160 pixels transflective display
Transflective polarizers have both reflecting and transmitting properties and offer the most versatile viewing characteristics.
They can be viewed in direct sunlight and when combined with a backlight in low light conditions.
28. BYU CS/ECEn 124 BYU eZ430X 28 LCD LCD - 100 x 160 pixels display
29. BYU CS/ECEn 124 BYU eZ430X 29 LCD lcd.c Prototypes
int lcd_init(void);
void lcd_volume(int volume);
void lcd_backlight(int backlight);
int lcd_display(int mode);
void lcd_clear(int value);
void lcd_image(const unsigned char* image,
int column, int page);
void lcd_blank(int column, int page,
int width, int height);
void lcd_cursor(int column, int page);
char lcd_putchar(char c);
void lcd_printf(char* fmt, ...);
30. BYU CS/ECEn 124 BYU eZ430X 30 FRAM FRAM
Ferroelectric Non-volatile RAM
8192 x 8 bits
45 year retention
i2c serial bus
Unlimited R/W cycles
31. BYU CS/ECEn 124 BYU eZ430X 31 LCD/FRAM - Graphics graphics.c
int lcd_FRAM_init(void);
void lcd_circle(int x0, int y0, int r0);
unsigned char lcd_point(unsigned int x,
unsigned int y, int flag);
int FRAM_init(int size, int data);
unsigned char FRAM_read(unsigned int address);
int FRAM_write(unsigned int address,
unsigned char datum);
int read_FRAM_point(unsigned int x,
unsigned int y);
int write_FRAM_point(unsigned int x,
unsigned int y, int value);
32. BYU CS/ECEn 124 BYU eZ430X 32 LCD Backlight LCD Backlight
P4.2 / TA2 (Jumper F)
Use PWM for dimming
33. BYU CS/ECEn 124 BYU eZ430X 33 Potentiometers Potentiometers
Use VREF+ (2.5v) internal reference and Vss (GND)
Linear potentiometers return 0-1023 values
ADC10 Channels:
12 = left potentiometer (P4.4, Jumper A1)
13 = right potentiometer (P4.3, Jumper G1)
34. BYU CS/ECEn 124 BYU eZ430X 34 Thermistor Thermistor
10k thermistor
Non-linear resistance
ADC10 Channels:
10 = internal temperature
15 = thermistor (Jumper C1)
35. BYU CS/ECEn 124 BYU eZ430X 35 Accelerometer ADXL345 Accelerometer
3-axis acceleration, ?2 g, ?4 g, ?8 g, or ?16 g
Dynamic acceleration (motion)
Static acceleration (gravity)
Polysilicon surface-micromachined structure
36. BYU CS/ECEn 124 BYU eZ430X 36 Sonar Transponder MaxBotix EZ0/1 Sonar Transponder
Sonar range from 6 to 254 inches (1 inch resolution)
Analog/serial digital output
37. BYU CS/ECEn 124 BYU eZ430X 37 Low Pass Filter Digital equivalent of an analog low pass RC filter
38. BYU CS/ECEn 124 BYU eZ430X 38 J1 Header
39. BYU CS/ECEn 124 BYU eZ430X 39 Jumpers
40. BYU CS/ECEn 124 BYU eZ430X 40 Simon Lab
41. BYU CS/ECEn 124 BYU eZ430X 41 Simon Lab
42. BYU CS/ECEn 124 BYU eZ430X 42 How To Code Assembler� Understand the problem (obviously)
Until you are comfortable in assembly, (and even afterwards), write out your solution in something familiar
English
Flowchart
Pseudo-code
Java, C, Ruby � the pseudo-code doesn�t really matter!
Then, translate to assembler
43. BYU CS/ECEn 124 BYU eZ430X 43