Download
1 / 27
270 likes | 402 Views
Processing and Reconstruction of Cryogenic Electron Microscope Tomography Images. Automatic tracking of fiducial markers across very low SNR images. Fernando Amat Farshid Moussavi Mark Horowitz LBL meeting-September 2006. Cryogenic Electron Microscope Tomography.

E N D
Processing and Reconstruction of Cryogenic Electron Microscope Tomography Images Automatic tracking of fiducial markers across very low SNR images Fernando Amat Farshid Moussavi Mark Horowitz LBL meeting-September 2006
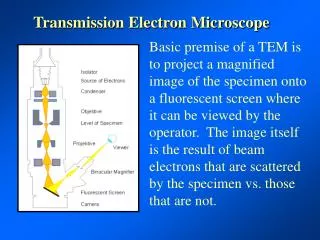
Cryogenic Electron Microscope Tomography • Take ~100 electron microscope images at different tilt angles and with finite dose budget (low SNR) • Align, reproject 2D images, do 3D reconstruction. • Quality of 3D reconstruction directly related to quality of 2D preprocessing.
Brief problem statement Caulobacter Images ? Very low SNR, faint features. Use fiducial markers. Automatically find accurate correspondences in images for alignment.
Outline • A Probabilistic Framework solution • Results • Future work • Discussion/Conclusions
Steps of Preparation for Reconstruction • Incomplete and unreliable data at first • Incorrect decisions cause more incorrect decisions downstream (errors propagate) Robust probabilistic framework
Probabilistic Framework • Maximum Likelihood Estimation. We want to find assignment to variables X ,Θ,y that maximizes : P(X ,Θ,y |O) • X , the set of 3D marker locations ‹R3xM, • y, the set of trajectories across images ‹ R2xMxN • Θ, set of microscope parameters • O, the set of observed peaks in the 2D images ‹ R2xMxN • (M=number of contours, N=number of images)
Probabilistic Framework (cont’d) • But we have the observed peaks, not the trajectories. • Correspondence is a discrete problem. • Projection model estimation is a continuous optimization problem. • We need to split the problem P(X ,Θ,y|O)=P(X ,Θ|y,O) * P(y|O) Projection model Correspondence
Aligned, reprojected images to 3D Reconstruction Feature Detection/ Location Correspondence Projection Model Estimation 2D Images Probabilistic framework: block diagram Finds O (peaks) Finds argmax P(y|O) Finds argmax P(X ,Θ|y,O) {y} {X ,Θ}
M1 K1 M2 K2 M3 K3 Mm Kk Correspondence • What is probability p(M->K) that i-th peak in image 1 corresponds to j-th peak in image 2? • Bipartite graph matching problem- O(N!) • Scores for individual matches may not be informative enough (look at groups of matches) How to make decisions with all this uncertainty? Markov Random Fields
Correspondence using Markov Random Fields • Discrete problem in nature • We estimate joint pairwise correspondence for all peaks in image 1 and 2 at the same time • Use simple geometric constraints • No use of projective model->robust to distortions • Invariant to translations->no need of prealign images • Complexity is exponential in number of peaks • Use approximate techniques which treat a joint distribution over M variables as a collection of pairwise distributions (complexity becomes O(M2))
Projection model • Find the solution to: D([x,y]T-[R|t][X Y Z 1]T) (1) • [x,y]: known points from correspondence • [R|t]: projective model (partially unknown) • [X Y Z]: 3D markers position (unknown) • D(): cost function • (1) is the ML solution to P(X ,Θ|y,O) assuming certain error model distribution for reprojection errors (related to D())
Results: Caulo 19 tomogram Manual reconstruction by Luis R. Comolli
Results: Caulo 19 tomogram Fully automatic reconstruction
Results: CyKR-He1 tomogram Manual reconstruction by Luis R. Comolli
Results: CyKR-He1 tomogram Fully automatic reconstruction
Results • Other tomogram reconstructions for different specimens are available. • They are not shown here to keep the talk short.
Future work • Occlusion: solve problems in high tilt angles for group of markers • Speed up the process • Extend Markov Random Fields correspondence to multiple images • Iterate correspondence and 3D model estimation using Expectation-Maximization if results are not satisfactory in one single pass
Discussions/Conclusions • Fully automated process to align images with fiducial markers: only a template of a marker is needed as an input • Accuracy results comparable to manual alignment in very low SNR images • Robust to distortions and error propagation