Download
1 / 1
10 likes | 155 Views
P. M. Introduction.

E N D
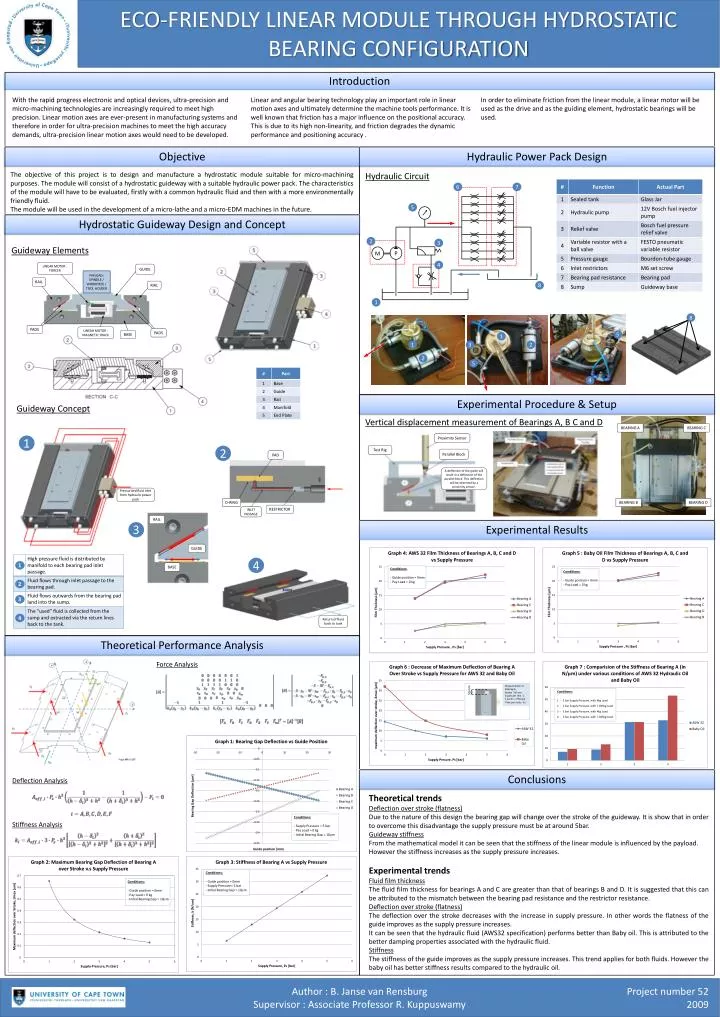
P M Introduction With the rapid progress electronic and optical devices, ultra-precision and micro-machining technologies are increasingly required to meet high precision. Linear motion axes are ever-present in manufacturing systems and therefore in order for ultra-precision machines to meet the high accuracy demands, ultra-precision linear motion axes would need to be developed. Linear and angular bearing technology play an important role in linear motion axes and ultimately determine the machine tools performance. It is well known that friction has a major influence on the positional accuracy. This is due to its high non-linearity, and friction degrades the dynamic performance and positioning accuracy . In order to eliminate friction from the linear module, a linear motor will be used as the drive and as the guiding element, hydrostatic bearings will be used. Hydraulic Circuit Hydrostatic Guideway Design and Concept Objective 6 7 5 LINEAR MOTOR : FORCER GUIDE PAYLOAD: SPINDLE / WORKPIECE / TOOL HOLDER The objective of this project is to design and manufacture a hydrostatic module suitable for micro-machining purposes. The module will consist of a hydrostatic guideway with a suitable hydraulic power pack. The characteristics of the module will have to be evaluated, firstly with a common hydraulic fluid and then with a more environmentally friendly fluid. The module will be used in the development of a micro-lathe and a micro-EDM machines in the future. Vertical displacement measurement of Bearings A, B C and D 2 RAIL 3 RAIL Hydraulic Power Pack Design Experimental Procedure & Setup Conclusions 4 Guideway Elements ECO-FRIENDLY LINEAR MODULE THROUGH HYDROSTATIC BEARING CONFIGURATION 8 PADS LINEAR MOTOR : MAGNETIC TRACK PADS BASE 1 8 5 1 1 3 2 2 5 4 BEARING A BEARING C Proximity Sensor Test Rig Parallel Block PAD A deflection of the guide will result in a deflection of the parallel block. This deflection will be observed by a proximity sensor. Guideway Concept Pressurized fluid inlet from hydraulic power pack O-RING BEARING B BEARING D 1 RESTRICTOR INLET PASSAGE 2 RAIL GUIDE 1 BASE Experimental Results 2 3 3 4 Return of fluid back to tank 4 Force Analysis Theoretical Performance Analysis Deflection Analysis Stiffness Analysis Theoretical trends Deflection over stroke (flatness) Due to the nature of this design the bearing gap will change over the stroke of the guideway. It is show that in order to overcome this disadvantage the supply pressure must be at around 5bar. Guideway stiffness From the mathematical model it can be seen that the stiffness of the linear module is influenced by the payload. However the stiffness increases as the supply pressure increases. Experimental trends Fluid film thickness The fluid film thickness for bearings A and C are greater than that of bearings B and D. It is suggested that this can be attributed to the mismatch between the bearing pad resistance and the restrictor resistance. Deflection over stroke (flatness) The deflection over the stroke decreases with the increase in supply pressure. In other words the flatness of the guide improves as the supply pressure increases. It can be seen that the hydraulic fluid (AWS32 specification) performs better than Baby oil. This is attributed to the better damping properties associated with the hydraulic fluid. Stiffness The stiffness of the guide improves as the supply pressure increases. This trend applies for both fluids. However the baby oil has better stiffness results compared to the hydraulic oil. Author : B. Janse van Rensburg Supervisor : Associate Professor R. Kuppuswamy Project number 52 2009