Download
1 / 56
620 likes | 934 Views
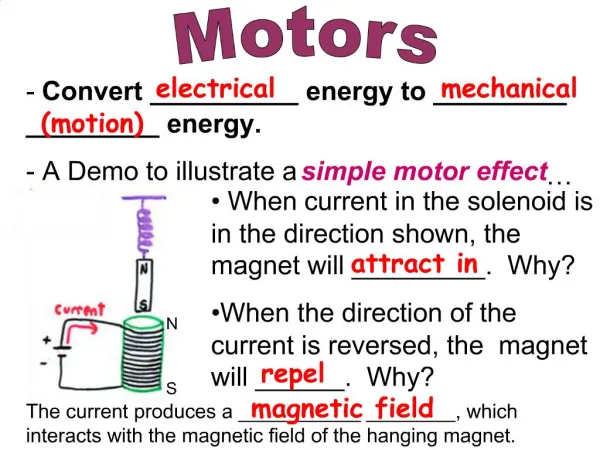
Introduction to Motors. Kurt Heinzmann DEKA Research & Development Corp. Christopher Mikus BAE Systems January 2005. Introduction to Motors. Topics

E N D
Introduction to Motors Kurt Heinzmann DEKA Research & Development Corp. Christopher Mikus BAE Systems January 2005
Introduction to Motors Topics 1. Manufacturers' torque curves and specification sheets 2. How to manage motor temperature rise 3. Gear ratio 4. Review of motors from the Kit of Parts 5. Which motor for which application on a robot?
Note • These slides have been edited since the presentation on 7 Jan 2005. • Distinction has been made between torque constant Kt and voltage constant Ke, because, although in an ideal motor, K = Kt = Ke, Kt and Ke differ significantly in a gearmotor. Some of the motors in the kit are gearmotors. • New material was added • Advice balloons • Comparison of motors in the Kit • Clarification of gear ratio selection
Steps • Assumptions and approximations • Power • Power loss in the mechanism • Power required at the motor • Power loss in the motor • Basic motor theory • Important motor parameters • Power loss in the motor • Power loss in other electrical components • Gear ratios • Comparison • Batteries
Assumptions and Approximations • Steady operation • We will not discuss acceleration requirements • Linear systems • We will represent nonlinear phenomena as linear • Simple motor analysis • Study only two power loss parameters • Loss due to electrical resistance • Loss due to friction and damping, combined in one fixed value
Example: Simplify. Assume fixed free current(combine the effects of friction and damping)
Power • Power is a measure of how fast work gets done. • POWER = EFFORT x FLOW “EFFORT” • force • torque • pressure • voltage • thinking • “FLOW” • travel speed • rotating speed • flow of fluid • flow of electrons • doing
Power Loss in the Mechanism • Some power from the motor is lost due to friction in the mechanism • Gears, belts, cables • Bearings, guides • Tires, balls, or other deformable items • Damage • Contamination • Power loss is heat Cooling a hot motor with snow or cold spray is not a suggested solution to heat generation. Changing the temperature of a motor’s components too quickly can cause permanent damage. Design your robot well to prevent motor overheating
Power required at the motor • Power at the motor = power required at the point of use + power lost in the mechanism • Power loss is heat
Power loss in the motor • Power is lost in the motor due to friction, damping, and electrical resistance • Power loss is heat Design your robot’s drive train such that it won’t bind under stress and add excessive friction to your system. Reduce friction and loading by properly supporting axles with bearings and pillow blocks. Reduce side loading by supporting both ends of axles and drive shafts.
Basic Motor Theory • Torque is rotating EFFORT, speed is rotating motion (“FLOW”) • Torque = force x radius • Voltage is electrical EFFORT, current is FLOW of electrons • Power = EFFORT x FLOW • Mechanical power P(out) = torque x speed • Electrical power P(in) = voltage x current • Shaft power = power in – power loss • Power loss is sum of electrical loss and mechanical loss
Basic Motor TheoryImportant motor parameters • Stall torque (stall ) • Stall current (istall ) • Free speed (free ) • Free current (ifree )
Basic Motor TheoryImportant motor parameters • Torque constant(Kt) • Torque is proportional to current • Units: (Nm/A) • Torque loss (loss) • We will derive this from free current • Unit: newtons (N) • Resistance (R) • Ohm’s law • Unit: ohm () newton-metres • ampere • Voltage constant(Ke) • Motor internal voltage is proportional to speed • Units: V/(rad/s) volts _ radian/second
International System (SI) of units Units, Conversions Prefixes: m = milli- = one thousandth (mm, mNm) k = kilo- = one thousand (km, kW)
Why use SI units? • Easier than U.S. Customary units • Electrical power gets converted to mechanical power. • If you express electrical power and mechanical power in watts, you know what’s happening at both ends of the motor. • Would you like to convert volts-times-amperes to horsepower? • Advice: Convert to SI units before doing any other calculation. • Consolation: you can always convert back.
Direct Current (DC), Permanent-Magnet (PM), Brush-Commutated Motor FIRST rules do not allow you to modify the internal components of a motor. Read the current year's rules to understand how you may modify gear boxes if at all.
Important motor parameters Given:stall,istall, free, ifree andV, Find: Kt, Ke, loss(free),and R. Some motors have an internal circuit breaker, which will stop the motor, or PTC thermistor*, which will stop or slow the motor by increasing its electrical resistance, if the motor gets too hot. After the motor cools, it runs normally again. Examples: Window motor Sliding door motor *PTC thermistor - resistor with a positive temperature coefficient
ExampleMotor From data sheet:From equation 3a:From equation 3b:From equation 4:From equation 5: stall = 0.65 Nm istall = 148 A free = 2513 rad/s ifree= 1.5 A Kt = 0.65 Nm / (148.0-1.5) A = 0.0044 Nm/A Ke = (12 V -1.5 A*0.081)/ 2513 rad/s = 0.0047 V/(rad/s) loss(free) = 0.0044 Nm/A x 1.5 A = 0.0066 Nm R = 12 V /148 A = 0.081
Equations 6 - 11 allow us to calculate the following performance curves as a function of torque (with constant voltage): • current (6) • speed (7) • output power (8) • input power (9) • power loss (10) • efficiency (11)
ExampleMotor - Power loss Best operation is to the left of where these lines cross.
Real World: Power loss 14 AWG wire: 3.0 m/ft. 12 AWG wire: 1.9 m/ft. 10 AWG wire: 1.2 m/ft. 6 AWG wire: 0.5 m/ft. (Copper at 65 °C)
Example motor, stalled for approximately 2 s • This circuit was not properly protected (wrong circuit breaker) • Measuring thermocouple was inserted near windings • (windings got hotter than thermocouple) • Brushes got hotter than windings
Example motor, stalled for approximately 2 s • Motor resistance increased from 67 m to 96 m (43%) in two seconds • Battery resistance = 18 m • Resistance of wires (5 ft. of 14 AWG), connectors, breakers, etc. = 25 m • Total circuit resistance increased to about twice the initial motor resistance
Performance of the system compared with motor performance based on data sheet
CIM motor (a.k.a. Chiaphua, a.k.a. Atwood) Be aware that a motor may have other names.
CIM motor data and curves Stall torque stall = 347 oz-in = 2.4 Nm Stall current istall = 114 A Free speed free = 5342 rpm = 560 rad/s Free current ifree= 2.4 A
CIM motor performance curves You will need to operate within the limits of the circuit breakers supplied with the kit! (20 A, 30 A, or 40 A)
Comparison of power available from example motor and CIM motor
Simple strategy • Calculate (or read from data sheet) the motor resistance R • Increase R by 50% - 100% • Calculate power curve • Operate at half of new peak power
"Gear" ratio: Mechanical power transmission efficiency is important • Spur gears: 90% per pair • Worm and gear: 10%-60% • Nut on a screw (not ball nut): 10%-60% • Twist cables: 30%-90% • Chain: 85%-95% • Wire rope (cables): up to 98% • Rack and pinion 50%-80%
Gear ratio Example:out = 1.5 Nm; out = 100 rad/s Pmotor =Pout / g (12)
Gear ratio example Output power = 1.5 Nm • 100 rad/s = 150 W Try: Spur gears (assume 90% efficiency per stage) Power required at motor Pmotor =Pout / g one stage: Pmotor = 150 W / 0.9 = 167 W two stages: Pmotor = 150 W / 0.9 /0.9 = 185 W three stages: Pmotor = 150 W / 0.9 /0.9 /0.9 = 206 W four stages: Pmotor = 150 W /0.9/0.9/0.9/0.9 = 229 W
Gear ratio exampleEstimate torque by inspection, then calculate an approximate gear ratio to determine how many gear stages are required.Rule of thumb for spur gears: max. ratio per stage = 5:1
Gear ratio - example motor Check: gear ratio Ng = motor/out = 1850 / 100 = 18.5:1 = 4.3 • 4.3 Operating point looks good (comfortably to the left of the peak power point)
Gear ratio - CIM motor Gear ratio Ng = motor/out = 388 / 100 = 3.9:1 Moderately heavy load for this motor (near peak power)