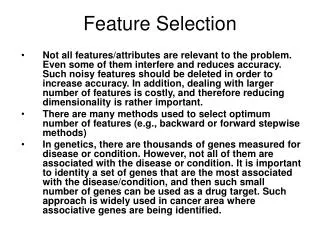
Download
1 / 35
350 likes | 497 Views
Feature Selection, Acoustic Modeling and Adaptation SDSG REVIEW of recent WORK. Technical University of Crete Speech Processing and Dialog Systems Group Presenter: Alex Potamianos. Outline. Prior Work Adaptation Acoustic Modeling Robust Feature Selection

E N D
Feature Selection, Acoustic Modeling and Adaptation SDSG REVIEW of recent WORK Technical University of Crete Speech Processing and Dialog Systems Group Presenter: Alex Potamianos
Outline • Prior Work • Adaptation • Acoustic Modeling • Robust Feature Selection • Bridge over to HIWIRE work-plan • Robust Features, Acoustic Modeling, Adaptation • New areas: audio-visual, microphone arrays TUC - SDSG
Adaptation • Transformation-based adaptation • MAP Adaptation(Bayesianlearning approximation) • Speaker Clustering / Speaker space models. • Robust Feature Selection • Combinations TUC - SDSG
Acoustic Model Adaptation: SDSG Selected Work • Constrained Estimation Adaptation • Maximum Likelihood Stochastic Transformations • Combined Transformation-MAP adaptation • MLST Basis Vectors • Incremental Adaptation • Dependency modeling of biases • Vocal Tract Norm. with Linear Transformation TUC - SDSG
Constrained Estimation Adaptation(Digalakis 1995) • Hypothesize a sequence of feature-space linear transformations: • Adapted models (A) are then: • diagonal. • Adaptation is equivalent to estimating the state dependent TUC - SDSG
Compared to MLLR(Leggeter 1996) • Both published at the same time. • MLLR is only model adaptation. • MLLR transforms only the model means • in MLLR is block diagonal. • Constrained estimation is more generic. TUC - SDSG
Limitations of the Linear Assumption • Linear assumption may be too restrictive in modeling the training testing dependency. • Goal: Try a more complex transformation. • All Gaussians in a class are restricted to be transformed identically using the same transformation. • Goal: Let each Gaussian in a class to decide for its own transformation. • Which transformation transforms each Gaussian is predefined. • Goal: Let the system to automatically choose the transformation-Gaussian couples. TUC - SDSG
ML Stochastic Transformations (MLST)(Diakoloukas Digalakis 1997) • Hypothesize a sequence of feature-space stochastic transformations of the form: TUC - SDSG
MLST: model-space • Use a set of MLSTs instead of linear transformations. • Adapted observation densities: • MLST-Method I • is diagonal • MLST-Method II • is block diagonal TUC - SDSG
MLST: Reduce the number of mixture components • The adapted mixture densities consist of Gaussians. • Reduce the Gaussians back to their SI number: • HPT: Apply the component transformation with the highest probability to each Gaussian. • LCT: Linear combination of all component transforms. • MTG: Merge the transformed Gaussians. TUC - SDSG
Schematic representation of MLST adaptation TUC - SDSG
MLSTproperties • Asj,bsjare shared at a state or state-cluster level • Transformation weights lj are estimated at a Gaussian level • MLST combines transformed Gaussians • MLST is flexible on how to select a transformation for each Gaussian. • MLST chooses arbitrary number of transformations per class. TUC - SDSG
MLST compared to ML Linear Transforms • Hard versus Soft decision: • Choose the linear component based on the training samples. • Adaptation Resolution: • Linear components are common to a transformation class • Choose the transformation at a Gaussian level • Increased adaptation resolution - robust estimation TUC - SDSG
MLST basis transforms (Boulis Diakoloukas Digalakis 2000) • Algorithm steps: • Cluster the training speaker space into classes • Train MLST component transforms using data from each training speaker class • Adaptation data is used to estimate the transformation weight • It is like having a-priori knowledge to the estimation process • Results in rapid speaker adaptation • Significant gains for medium and small data sets TUC - SDSG
Combined Transformation Bayesian (Digalakis Neumeyer 1996) • MAP estimation can be expressed as: • Retain the asymptotic properties of MAP • Retain fast adaptation rates of transformations. TUC - SDSG
Rapid Speech Recognizer Adaptation (Digalakis et.al 2000) • Dependence models of the bias components of cascaded transforms. Techniques: • Gaussian multiscale process • Hierarchical tree-structured prior • Explicit correlation models • Markov Random Fields TUC - SDSG
VTN with Linear Transformation(Potamianos and Rose 1997, Potamianos and Narayanan 1998) • Vocal Tract Normalization: Select optimal warping factor according to = arg max P(Xª|a, , H) where H is the transcription, and Xª frequency warped observation vector by factor a. • VTN with linear transformation {, } = arg max P(Xª|a, , , H) where h() is a parametric linear transformation with parameter TUC - SDSG
Acoustic Modeling:SDSG Selected Work • Genones: Generalized Gaussian mixturetying scheme • Stochastic Segment Models (SSMs) TUC - SDSG
Genones: Generalized Mixture Tying (Digalakis Monaco Murveit 1996) • Algorithm Steps: • Clustering of HMM states based on the similarity of their distributions • Splitting: Construct seed codebooks for each state cluster • Either identify the most likely mixture component subset • Or cluster down the original codebook • Reestimation of the parameters using Baum-Welch • Better trade-off between modelling resolution and robustness • Genones are used in Decipher and Nuance TUC - SDSG
Segment Models • HMM limitations: • Weak duration modelling • Conditional independence of observations assumption • Restrictions on feature extraction imposed by frame-based observations • Segment models motivation: • Larger number of degrees of freedom in the model • Use segmental features • Model correlation of frame-based features • Powerful modelling of transitions and longer-range speech dynamics • Less distortion for segmental coding segmental recognition more efficient TUC - SDSG
General Stochastic Segment Models • A segment s in an utterance of N frames is s = {(τa , τb): 1≤ τa≤ τb≤ N} • Segment model density: • Segment models generate a variable-length sequence of frames TUC - SDSG
Stochastic Segment Model (Ostendorf Digalakis 1992) • Problem: Model time correlation within a segment • Solution: Gaussian model variations based on assumptions about the form of statistical dependency • Gauss-Markov model • Dynamical System model • Target State model. TUC - SDSG
SSM Viterbi Decoding (Ostendorf Digalakis Kimball 1996) • HMM Viterbi recognition: • State to Word sequence mapping: • SSM analogous solution: • Map the segment label sequence to the appropriate word sequence: TUC - SDSG
From HMMs to Segment Models(Ostendorf Digalakis 1996) • Unified view of stochastic modeling • General stochastic model that encompasses most SM type models • Similarities in terms of correlation and parameter tying assumptions • Analogies between segment models and HMMs TUC - SDSG
Robust Feature Selection • Time-Frequency Representation for ASR (Potamianos and Maragos 1999) • Confidence Measure Estimation for ASR Features sent over wireless channels (“missing features”) (Potamianos and Weerackody 2001) • AM-FM Model Based Features (Dimitriadis et al 2002) TUC - SDSG
Other Work • Multiple source separation using microphone arrays (Sidiropoulos et al. 2001) TUC - SDSG
Prior Work Overview Constr. Est. Adapt. MLST. Combinations MAP (Bayes) Adapt. VTLN Genones Segment Models Robust Features TUC - SDSG
HIWIRE Work Proposal Adaptation Bayes optimal class. Acoustic Modeling Segment Models Feature Selection AM-FM Features Microphone Arrays Speech/Noise Separation Audio Visual ASR Baseline experiments TUC - SDSG
Bayes optimal classification (HIWIRE proposal) • Classifier decision for a test data vector xtest: • Choose the class that results in the highest value: TUC - SDSG
Bayes optimal versus MAP • Assumption: the posterior is sufficiently peaked around the most probable point • MAP approximation: • θMAP is the set of parameters that maximize: TUC - SDSG
Why Bayes optimal classification • Optimal classification criterion • The prediction of all the parameter hypotheses is combined • Better discrimination • Less training data • Faster asymptotic convergence to the ML estimate • However: • Computationally more expensive • Difficult to find analytical solutions • ....hence some approximations should still be considered TUC - SDSG
Segment Models • Phone Transition modeling • New features • Combine with HMMs • Parametric modeling of feature trajectories TUC - SDSG
AM-FM Features • See NTUA presentation TUC - SDSG
Audio-Visual ASR • Baseline TUC - SDSG
Microphone Array • Speech – Noise source separation algorithms TUC - SDSG