Download
1 / 1
10 likes | 220 Views
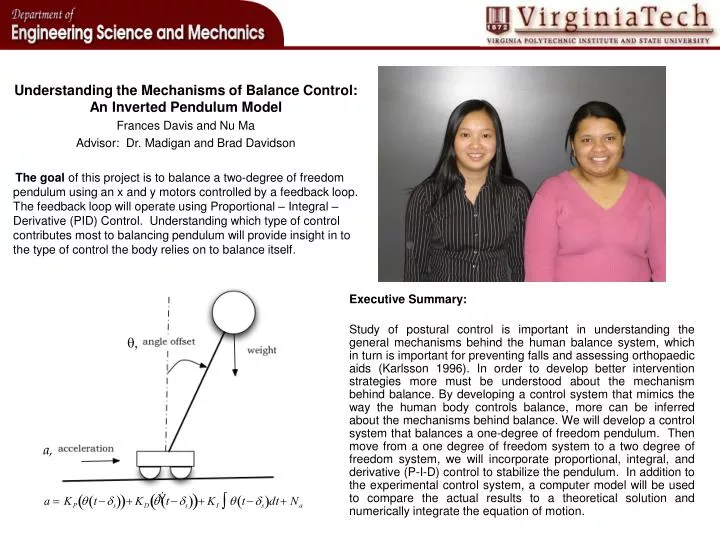
. a,. Understanding the Mechanisms of Balance Control: An Inverted Pendulum Model Frances Davis and Nu Ma Advisor: Dr. Madigan and Brad Davidson

E N D
a, Understanding the Mechanisms of Balance Control: An Inverted Pendulum Model Frances Davis and Nu Ma Advisor: Dr. Madigan and Brad Davidson The goalof this project is to balance a two-degree of freedom pendulum using an x and y motors controlled by a feedback loop. The feedback loop will operate using Proportional – Integral – Derivative (PID) Control. Understanding which type of control contributes most to balancing pendulum will provide insight in to the type of control the body relies on to balance itself. Executive Summary: Study of postural control is important in understanding the general mechanisms behind the human balance system, which in turn is important for preventing falls and assessing orthopaedic aids (Karlsson 1996). In order to develop better intervention strategies more must be understood about the mechanism behind balance. By developing a control system that mimics the way the human body controls balance, more can be inferred about the mechanisms behind balance. We will develop a control system that balances a one-degree of freedom pendulum. Then move from a one degree of freedom system to a two degree of freedom system, we will incorporate proportional, integral, and derivative (P-I-D) control to stabilize the pendulum. In addition to the experimental control system, a computer model will be used to compare the actual results to a theoretical solution and numerically integrate the equation of motion.