Download
1 / 70
720 likes | 956 Views
Explore the basics of machine vision systems, covering image acquisition with light, camera, and pixels, image processing like filtering and segmentation, and analysis through feature extraction and pattern recognition.

E N D
Machine Visionlecture 1 Thomas Moeslund Computer Vision and Media Technology lab. Aalborg University tbm@cvmt.dk
Pose estimation Pick and place applications Bin-picking Classification Quality control THOR Machine vision applications HOF THOR Conveyor belt
Machine Vision class • Purpose: • Provide an overview of the different elements in a machine vision system
Machine Vision class • Topics • Acquisition of images: • Light, camera, lens • Representation of digital images: • pixels, colors • Processing of images • filtering, segmentation • Analysis of images: • feature extraction, pattern recognition • Your interests and needs?
Plan for today • Where does an image come from? • Image definitions • Camera types • Image formation • Lens • Creating light for machine vision • ( other applications )
Where does an image come from? Charged coupled device CCD-chip
Where does an image come from? Under exposed • Integration over time • Exposure time/shutter time • DK: lukketid • Maximum charge • Saturation • Blooming Correct exposed Over exposed
Where does an image come from? • Image elements, picture elements, pels, pixels
Origin x f(x,y) y Digital Image Representation • Image is seen as a discrete function f(x,y) as opposed to a continuous function • x and y cannot take on any value!
Origin f(0,0) x x f(x,y) f(2,6) y y Discrete image coordinate system
Digital Image Representation • Pixel representation (bits) • One bit: {0,1} • One byte = eight bits • One pixel: one byte = eight bits = one number: [0,255] • Grey-scale, intensity, black/white: 8 bits = [0,255] • Binary image: 1 bit {0,1}. Black and white: visualized as: 8 bit {0,255} ( colors: Another lecture ) • Video: 25 – 60 images per second. • Framerate: 25Hz – 60Hz • For example: 500 x 500 pixel at 50Hz => 1.25x107 bytes per second!!!!
ROI Digital Image Representation Width • An image f(x,y) is represented as an Array • Width = number of pixels in x-direction • Height = number of pixels in y-direction • Size (width x height, width > height) • ROI = region of interest • To reduce the amount of data Height
Spatial Image Resolution: • Resolution • The size of an area in a scene that is represented by one pixel in the image • Different Resolutions are possible (256x256….16x16) • Lower resolution leads to data reduction!
Gray-level Resolution: Quantization • Different gray-level resolutions: 256, 128, …, 2 • Less gray-levels leads to data reduction. • For 256, 128, 64 gray-levels: Difference hardly visible
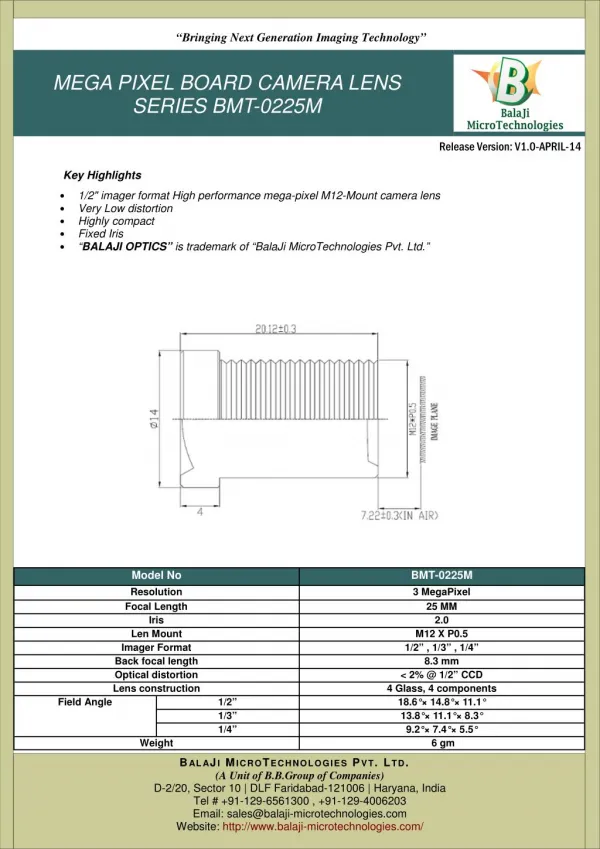
Sensor Chip Formats Number of Pixels from 500x500 to 5000x5000 Pixel size from 4m x 4 m to 16 m x 16 m
The lens • A lens focuses a bundle of rays to one point • Parallel rays pass through a focal point at a distance F beyond • the plane of the lens. F is the focal length • Ois the optical center • F and O span the optical axis
Focus and depth-of-field • Depth-of-field (DK: dybteskarphed) • Distance range in which the blur does not exceed a certain value
Depth-of-field Aperture (DK: blænde) • More aperture => better depth-of-field • Downside: less light enters => decrease exposure time => • risk of blur due to motion
Field-of-view • Field-of-view depends on size of chip and focal length • ”Fisheye” lens => small focal length and large field-of-view
Levels of Natural Light [Burke]
Lighting • ”In machine vision lighting is more than 50%” • Use controlled lighting! • Avoid direct/indirect sunlight • Build a housing covering the field-of-view of the camera • Avoid highlights
Illumination Setups Directed illumination Diffuse illumination Rear illumination Light field illumination
Spherical Marker • Viewpoint invariant • High reflectance in illumination direction
Infrared Illumination • Fast segmentation by adaptive threshold • Robust Visually Opaque IR pass filter
Exercises (1/3) • Given a 512 x 512 x 8bit image. How many different images can be made? • Given a 512 x 512 x 8bit image. How is the memory size reduced when you: • Decrease the grayscale resolution repeatedly by 2 • Decrease the x-size and y-size of the image repeatedly by 2 • What do you want to learn in this class?
Exercises (2/3) • Describe the following concepts and provide examples of their usages: • Classification, Quality control, Pose estimation, Bin-picking • What is a CCD-chip and how does it operate? • What is Depth-of-field (DK:dybteskarphed)? • Pros and cons of back-lighting?
Exercises (3/3) • Show that the following is true for a thin lens: • Mick is 2m tall and standing 5m from a camera. The camera’s focal length is 5mm. • At which distance from the lens is Mick in focus? • How tall (in mm) will Mick be on the CCD-chip? • How tall (in pixels) will Mick be on the CCD-chip? • The camera has a 1/2” CCD chip • The camera image has a size of: 480x640 pixels • What is field-of-view of the camera?
Working with images…. • Image manipulation • Simple operations, e.g., scale image • Image processing • Improve the image, e.g., remove noise • Image analysis • Analyze the image, e.g., find the person in the image • Machine vision • Industry, e.g., Quality control, Robot control • Computer vision • Everything: multiple cameras, video-processing, etc.
Image file types • image.jpg, image.tif, image.gif, image.png, image.ppm, …. • Raw: • No data is lost • Header + data (234 235 32 21…) • For example: image.pgm • The file can be viewed • Lossless compression: • No data is lost, but the file cannot be viewed • For example: image.gif • Lossy compression: • Better compression • Some data is lost (optimized from the HVS’ point of view) • The file cannot be viewed • For example: image.jpg
Image file types • Normally you don’t care about the file type • The application will take care of it for you: • For example: rotate • Application • image.x => raw • Rotate the raw image • Rotated raw => rotated_image.x • But to write your own programs from scratch the images need to be in the raw format (without a header).