Download
1 / 7
70 likes | 149 Views
Local sensors. At (local) detector: u tms = 20 km/u ! (18% > space mean) TT = 3 min/km! (17% < real TT). Round 1: 30 km/h Round 2: 20 km/h Round 3: 10 km/h. Average travel time TT = 3.6 min/km So space mean speed: u sms = 16.36 km/u. Detector. Local sensors.

E N D
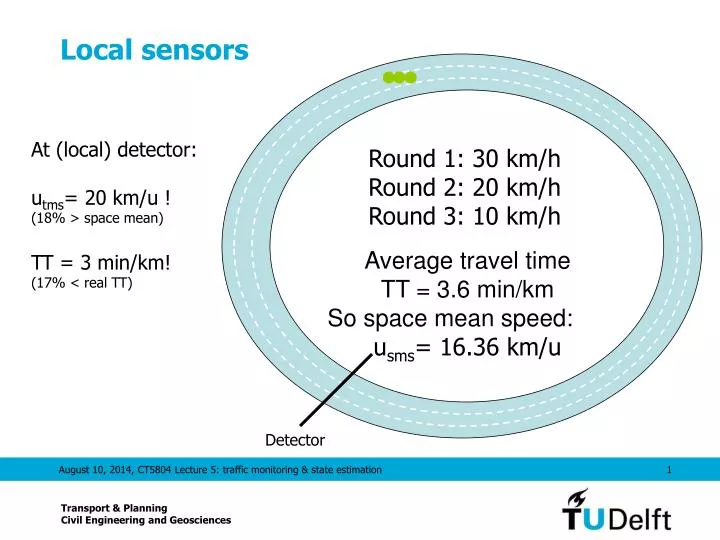
Local sensors At (local) detector: utms= 20 km/u ! (18% > space mean) TT = 3 min/km! (17% < real TT) Round 1: 30 km/h Round 2: 20 km/h Round 3: 10 km/h Average travel time TT = 3.6 min/km So space mean speed: usms= 16.36 km/u Detector
Local sensors At detector after 1 hour: utms= 23 km/u ! (17% > space mean) TT = 2.6 min/km! (14% < real TT) Red car: 30 km/u Yellow car: 20 km/u Blue car: 10 km/u After 1 hour: TT = 3 min/km thus usms=20 km/u ! Detector
Yes it matters: time mean induces serious bias (speeds) • Difference instantaneous space mean, time and harmonic mean • Data from measured vehicle trajectories (over a section) • Differences in speeds > 100%! • Strongly related to measurement location • Proportional to variance in individual speeds
Yes it matters: time mean induces serious bias (also in estimated travel times) Measured travel time Estimated travel time (harmonic mean speed) Estimated travel time (Time mean speed)
Solution: harmonic averaging local quantities • Average of quantity z over space: • Fill in z = v (speed) and you get
Relevance harmonic averaging • Most ITS need the space mean of a quantity: unbiased proxy with harmonic average (premise: stationarity and homogeneity) • Continuity relation: q = ku; density from flow and speed: k = q/u • Only valid with space mean speed (thus harmonic local mean!) • Differences (estimated and real density) up to 100% and more