Download
1 / 1
10 likes | 136 Views
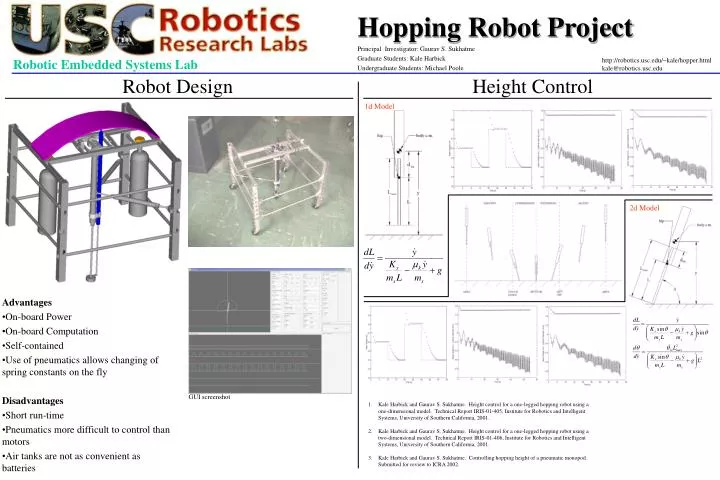
http://robotics.usc.edu/~kale/hopper.html kale@robotics.usc.edu. Robotic Embedded Systems Lab. 1d Model. 2d Model. GUI screenshot.

E N D
http://robotics.usc.edu/~kale/hopper.html kale@robotics.usc.edu Robotic Embedded Systems Lab 1d Model 2d Model GUI screenshot • Kale Harbick and Gaurav S. Sukhatme. Height control for a one-legged hopping robot using a one-dimensional model. Technical Report IRIS-01-405, Institute for Robotics and Intelligent Systems, University of Southern California, 2001. • Kale Harbick and Gaurav S. Sukhatme. Height control for a one-legged hopping robot using a two-dimensional model. Technical Report IRIS-01-406, Institute for Robotics and Intelligent Systems, University of Southern California, 2001. • Kale Harbick and Gaurav S. Sukhatme. Controlling hopping height of a pneumatic monopod. Submitted for review to ICRA 2002.