Download
1 / 1
10 likes | 169 Views
Hide n’ Seek Robot. By Ivan See and Karen Tsang. OBJECTIVE. COMPONENTS. DC Motor Module This module contains 2 motors, each motor is controlled one side of the wheels. It can move forward, backward, turn left, turn right and even make 0 degree radius turns. DC Motor Controller IC PDA

E N D
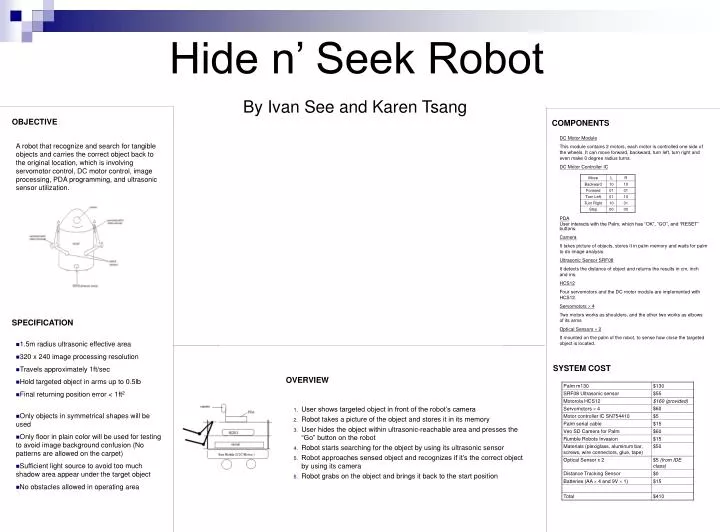
Hide n’ Seek Robot By Ivan See and Karen Tsang OBJECTIVE COMPONENTS DC Motor Module This module contains 2 motors, each motor is controlled one side of the wheels. It can move forward, backward, turn left, turn right and even make 0 degree radius turns. DC Motor Controller IC PDA User interacts with the Palm, which has “OK”, “GO”, and “RESET” buttons. Camera It takes picture of objects, stores it in palm memory and waits for palm to do image analysis. Ultrasonic Sensor SRF08 It detects the distance of object and returns the results in cm, inch and ms. HCS12 Four servomotors and the DC motor module are implemented with HCS12. Servomotors 4 Two motors works as shoulders, and the other two works as elbows of its arms Optical Sensors 2 It mounted on the palm of the robot, to sense how close the targeted object is located. A robot that recognize and search for tangible objects and carries the correct object back to the original location, which is involving servomotor control, DC motor control, image processing, PDA programming, and ultrasonic sensor utilization. SPECIFICATION • 1.5m radius ultrasonic effective area • 320 x 240 image processing resolution • Travels approximately 1ft/sec • Hold targeted object in arms up to 0.5lb • Final returning position error < 1ft2 SYSTEM COST OVERVIEW • User shows targeted object in front of the robot’s camera • Robot takes a picture of the object and stores it in its memory • User hides the object within ultrasonic-reachable area and presses the “Go” button on the robot • Robot starts searching for the object by using its ultrasonic sensor • Robot approaches sensed object and recognizes if it’s the correct object by using its camera • Robot grabs on the object and brings it back to the start position • Only objects in symmetrical shapes will be used • Only floor in plain color will be used for testing to avoid image background confusion (No patterns are allowed on the carpet) • Sufficient light source to avoid too much shadow area appear under the target object • No obstacles allowed in operating area