Download
1 / 21
220 likes | 407 Views
Modeling & Simulation of a Spring-Assisted Robot Arm. ME 6105 Fall 2012 – 12/06/2012 Lewis Lo, Benjamin Daniels, Matthew Rosen, Merlin Morlock. abb.com. Introduction & Domain. 4 axis robot based on the ABB IRB660 palletizing & materials handling up to 250 kg load

E N D
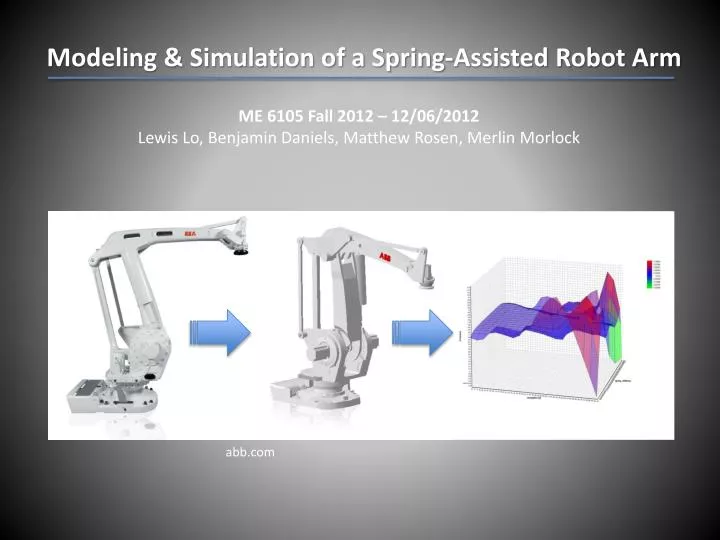
Modeling & Simulation of a Spring-Assisted Robot Arm ME 6105 Fall 2012 – 12/06/2012 Lewis Lo, Benjamin Daniels, Matthew Rosen, Merlin Morlock abb.com
Introduction & Domain • 4 axis robot based on the ABB IRB660 • palletizing & materials handling up to 250 kg load • Torsional spring at lower arm • Goal: design a motor with spring at lower arm joint to maximize utility • performance attributes: 1. Energy consumption • 2. End-effector position error ME6105 - Spring Assisted Robot Arm
Motor Parameters Design • Back calculating Torque (~20kN) to find k and R, motor paramters • Use of gear box (~182/1)to increase Torque • Thanks for help from Prof. Paredis in Motor Cost estimation ME6105 - Spring Assisted Robot Arm
SwitchingMass • Halfwaythroughtrajectorythepayloadmassisdecreased • from 60 kg to 1kg simulates picking & placing ME6105 - Spring Assisted Robot Arm
Controller Design 1/2 - Inverse Dynamics • Advantage • inverse dynamicsautomaticallycalculatesneededvoltageforgiven angle • PID controllershaveminorworkto do tocompensateuncertaintiesanddisturbances ME6105 - Spring Assisted Robot Arm
Controller Design 1/2 - Inverse Dynamics • But howtorealize Inverse Dynamics? • change all inputstooutputs ME6105 - Spring Assisted Robot Arm
Controller Design 1/2 - Inverse Dynamics • But howtorealize Inverse Dynamics? • change all inputstooutputs comicforum.de
Controller Design 1/2 - Inverse Dynamics • But howtorealize Inverse Dynamics? Let Dymola do thework! • copy model • change all inputstooutputsandviceversa • e.gsensorstoactuatorsandviceversa • makeresistance negative • makedamping negative • Disadvantageof Dymola Trick • problemsoccuredwith multiple inputsandoutputswhenthereisdamping & resistance Physically Not meaningful But doesthejob ME6105 - Spring Assisted Robot Arm
Example INVERSION ofmotor & mechanics ME6105 - Spring Assisted Robot Arm
Controller Design 2/2 – PID controllerused in project • Advantage • SISO control design easy • Disadvantages • PID controllers pull all theweight • Trick: make controller extremely stiff: P=40 000 !! ME6105 - Spring Assisted Robot Arm
Overall Model Structure • Trajectories, PID Controllers, DC Motors & Mechanics • Error & Energy measurement performance attributes
Animation for Fixed Path ME6105 - Spring Assisted Robot Arm
Whatisthe Spring goodfor? • parabolicfunctionforenergyconsumption morethan 50% energysavingspossible Energyconsumption Spring stiffness Max Motor speed ME6105 - Spring Assisted Robot Arm
Detailed Demand Spreadsheet ME6105 - Spring Assisted Robot Arm
Detailed Demand Spreadsheet • Modify Profit in `ProfitUtility´ spreadsheet • Fordiscountfactors • Discount Limits Realizewithifstatement • Modify thisanddragtorightand down ME6105 - Spring Assisted Robot Arm
Detailed Demand Spreadsheet • Modify Utility in `ProfitUtility´ spreadsheet • introduce time preference discountprofitandplug in intoutilityfunction • But don‘tforgettochangethecalculationofexpecteddemandsincecostdepends on demandnow = `loop´ • Modify thisanddragtorightand down change In ProfitUtility usingPre-predictor In TEAM_USE ME6105 - Spring Assisted Robot Arm
Motor Cost & Loop • Motor Costas design variable • ´Loop´ in spreadsheetcanbeseen ininfluencediagram ME6105 - Spring Assisted Robot Arm
Design Space Exploration & Optimization • Changed of modification cost at zero spring size to exponential function to ensure smooth design surface • Optimization results not too close to design space bounds. ME6105 - Spring Assisted Robot Arm
Design Problem Results Profit ME6105 - Spring Assisted Robot Arm
THANK YOU VERY MUCH • FOR YOUR ATTENTION! • QUESTIONS? ME6105 - Spring Assisted Robot Arm