Download
1 / 14
150 likes | 382 Views
Cascade control of unstable systems with application to stabilization of slug flow. Espen Storkaas and Sigurd Skogestad Dep. of Chemical Engineering Norwegian University of Science and Technology Presented at AdChem’03 Hong Kong. Outline. Unstable systems

E N D
Cascade control of unstable systems with application to stabilization of slug flow Espen Storkaas and Sigurd Skogestad Dep. of Chemical Engineering Norwegian University of Science and Technology Presented at AdChem’03 Hong Kong
Outline • Unstable systems • Properties of stabilizing control loop • Effect of stabilized poles on higher level control loops • Application to Anti Slug Control
Unstable systems • G(s)=C(sI-A)-1B+D, unstable if |λi(A)|>0 for any i • Feedback stabilization of G(s) requires active use of inputs • Lower bandwidth limit • Lower limit on H2-and H∞-norms of KS = K(I+GK)-1 • Unstable (RHP) zeros and time delay imposes upper limit on bandwidth • Incompatible bandwidth requirements => stabilizing control impossible
Stabilizing control • G2 unstable with RHP poles pi stabilized by K2 • Internal stability • S2=(1+G2K2)-1 contains unstable poles of G2 as zeros • Process as seen from primary layer: G=G1S2K2
Effect of stabilizing control on primary control layer Case 1: Unstable poles of G2 detectable in y1 – Same unstable poles in G1 and G2 • No effect of unstable poles in G2 on primary control layer • Zeros in S2 inG=G1S2K2 cancelled by poles in G1 • Bandwidth limitations only from G1
Effect of stabilizing control on primary control layer Case 2 : Unstable poles of G2 not detectable in y1 • Unstable poles in G2 affects the primary loop as RHP zeros in G=G1S2K2 • Bandwidth limitation due to unstable G2: ωB1<min(pi2) • May be benificial to operate at faster instabilities
Example – Anti Slug Control Experiments performed by the Multiphase Laboratory, NTNU
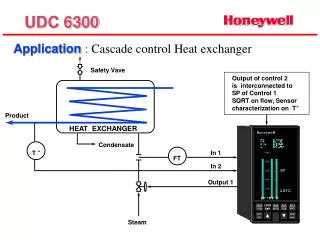
r2 K2 Measurement selection • Unstable poles at p=0.0008±0.007i • Zeros: • Using y2 = Q as secondary control variable
r2 K2 r1 K1 P2 z Choise of primary control variable y1 • y1= P2 yields case 1 behaviour (instability detectable in y1) • RHP zeros in G1 itself limits performance • y1 = u2 (input reset, G1=1) yields case 2 behaviour • RHP zeros from poles of G2 limits performance
Conclusions • Stabilizied poles will affect the higher level control loops as unstable zeros when unstable poles are not detectable in primary control variables • May be beneficial to operate at faster instabilities if fast responses are needed for the primary control objective • Problem illustrated with stabilization of severe slugging
Acknowledgements • Norwegian Research Council for finacial support • ABB and Statoil for supervision and collaboration