Download
1 / 34
340 likes | 540 Views
The GBT Precision Telescope Control System. Kim Constantikes. Introduction. Brief overview of the Green Bank Telescope (GBT) and scientific requirements on pointing, efficiency,etc. Experimental results Brief overview of the Precision Telescope Control System (PTCS)

E N D
The GBT Precision Telescope Control System Kim Constantikes
Introduction • Brief overview of the Green Bank Telescope (GBT) and scientific requirements on pointing, efficiency,etc. • Experimental results • Brief overview of the Precision Telescope Control System (PTCS) • Overview our exploratory data processing environment, the Engineering Measurement System (EMS) • The GBT is performing surprisingly well • We are enhancing instrumentation and investigating GBT phenomenology at level of arcsecs, 100’s of microns wavefront error • The EMS has been used to perform GBT laser rangefinder surveys at millimeter levels, will be used for other GBT investigations and prototype real-time compensations
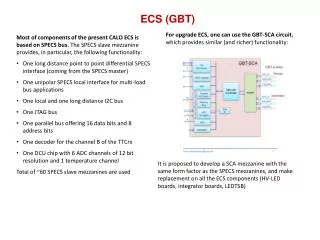
Telescope Structure and Optics • Offset-Gregorian design • Operation to 115 GHz, 40 GHz winter 2003-2004 • Optics: 110 m x 100 m of a 208 m parent paraboloid • Effective diameter: 100 m • Off axis feedarm • Elevation Limit: 5° • Slew Rates: Azimuth - 40°/min; Elevation - 20°/min • Main Reflector: 2209 actuated panels with 68 m rms. • Total surface: rms 400 m • FWHM Beamwidth: 740"/f(Ghz) • Prime Focus: Retractable boom • Gregorian Focus: • 8-m elliptic subreflector with 6-degrees of freedom • Rotating Turret with 8 receiver bays
The Real vs. Ideal GBT: Servo Effects and Structure Vibration
PTCS: Paradigms, Models • PTCS composed of four elements (April 2003 CODR): • High Frequency Observing System: The observer’s interface • Engineering Measurement System: Algorithm/analysis/control exploration tools • Precision Measurement System: Production measurements • Precision Control System: Control and models wrapped around existing Antenna Manager (M&C) components • Alternative approaches for risk mitigation: • Direct measurement of figure/position/orientation, additional closed loop control • Empirical corrections to pointing, focus • Model structure, measure perturbing influences (mainly wind and thermal gradients) • Direct measurements not currently sufficient for 100 Ghz, • Empirical methods in development and test • Some models in use: FEM adjustment of primary, structure linearity/superposition • Considering new models to identify/predict perturbations (thermal-structural model), plate scales and abberations (optical model) • Additional closed loop control not currently needed • Structure vibration is typically small, not significantly excited by shaped trajectories or wind-pumping, lowest structure mode ~ 0.6 Hz • Current emphasis is antenna characterization using multiple instruments and astronomical inferences
PTCS: Instruments (Current) • 12 laser rangefinders in ring around GBT • 19 precision structural temperature sensors • Thermal corrections for pointing, primary shape (?) • 2 precision air temperature sensors • Characterize group refractive index variation degradation to laser rangefinder accuracy, convective heat transfer model for GBT structure • Quadrant Detector • Measure feed arm position (angle-angle) from elevation axle • 3 weather stations • Servo monitoring for azimuth and elevation drives • Torques, rates, etc. • 1 2-axis 10mG accelerometer set on FA tip
PTCS: Instruments (in Development) • 2 2-axis clinometers (0.2 arcsec) on elevation bearings • Map azimuth track variations • Additional air temperature sensors • Characterize vertical refractive index, convective heat transfer • Additional 3-axis accelerometer sets • Compensation for vibration (need high-bandwidth tertiary element) • Structural health monitoring via modal analysis • Hot wire (self-heating thermistor) wind speed • Measure 3-D wind with low time constants, compensate with tertiary element • Wide-field star tracker • Measure differential orientation of locations on structure, e.g., subreflector actuator mount points
Engineering Measurement System • Algorithm development and numerical analysis • Initially for real-time laser rangefinder multilaterations • Continues as exploratory environment for production measurement and control • Consists of: • Top level signal flow-graph representation, data-driven process: Wit • Data transport to/from monitor and control: TCP and SOAP • Database connectivity for calibrations, configurations, etc. • Scripting/numerical/visualization environment: Matlab • API to C, C++, etc • Wit provides easy probing of graph, drag and drop dataflow design • Matlab has rich algorithm and visualization environment • Databases organize large datasets, e.g., retro glass offsets, instrument calibrations • SOAP transport provides direct access to GBT M&C data • Wit and Matlab provide migration to standalones, libraries
Example: Multilateration with laser rangefinders • Initialize coordinate transforms, rangefinder calibrations, retro excess path lengths, etc. from database • Calculate and smooth path group refractive index, rangefinder zero points and “leakage” signals • Correct measured path phases • Predict range from rangefinder to target using structural FEM • Calculate measured range from corrected phases, predicted ranges • Select range data by target • Non-linear least-squares estimate of retro position from ranges and rangefinder positions • Save intermediate,final results to database; real-time probe and plot quantities of interest
Example: Multilateration with laser rangefinders Graph state defined by edge data, Matlab engine retains state in global structures Can probe or break on edges, pause execution, and use full MATLAB IDE in paused state Hierarchical graphs modularize operators Graph edges carry primitive data types, structures, generic objects Graph nodes execute when input data are available Node parameters can be changed on the fly, parameters can be promoted to inputs, etc. Database operations via ODBC and SQL
Other Applications • Prototype real-time visualization and correction of low-rate effects: • Thermal pointing errors: • Structural and air temp monitoring • Predictive algorithm, e.g. linear regression • SOAP/TCP to/from GBT Monitor and Control System • Alidade tilts and azimuth track flatness: • Elevation bearing clinometers • SOAP/TCP . • Wind-induced feed-arm motion: • Quadrant Detector • Pointing coefficients • SOAP/TCP
Additional Information on PTCS Project documentation can be found at: http://wiki.gb.nrao.edu/bin/view/PTCS/WebHome • CODR • Project and System Notes • Various design and status information • Information for Astronomers (under construction) • Experiments and results See our poster The GBT Engineering Measurement System (P9.9) for more details…
The Real vs. Ideal GBT: Gravity Delta-X (mm) Delta-Y (mm) Delta-Z (mm) Elevation