Download
1 / 19
210 likes | 289 Views
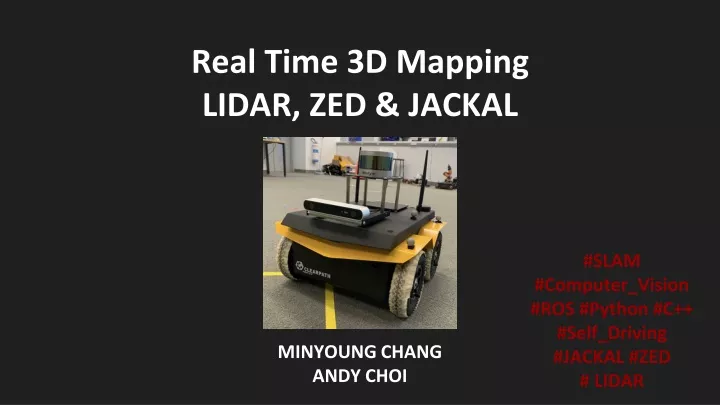
Explore the hardware setup using PUCK VLP-16 LIDAR sensor, ZED Stereo Camera, and JACKAL platform for SLAM. Implement Computer Vision algorithms in ROS with Python and C++. Self-driving concepts integrated for enhanced mapping. Localization and loop closure detection for precise mapping results. Cornell University's Upson Hall location showcased.

E N D
Real Time 3D Mapping LIDAR, ZED & JACKAL #SLAM #Computer_Vision #ROS #Python #C++ #Self_Driving #JACKAL #ZED # LIDAR MINYOUNG CHANG ANDY CHOI
HARDWARE SETUP PUCK VLP-16 LIDAR Sensor < Velodyne > ZED Stereo Camera < STEREO LABS > JACKAL < CLEARPATH >
RQT GRAPH LIDAR ZED CAMERA RTAB-Map JACKAL
ZED Stereo Camera rtabmap/cloud_map LIDAR Velodyne VLP-16 RTAB-Map /zed/rgbd_image /tf /velodyne_points /imu_filter JACKAL /odometry/filtered JACKAL velocity controller /ekf_localization
ZED Stereo Camera rtabmap/cloud_map LIDAR Velodyne VLP-16 RTAB-Map /zed/rgbd_image /tf /velodyne_points /imu_filter JACKAL ODOMETRY / TF /odometry/filtered JACKAL velocity controller /ekf_localization
ZED Stereo Camera rtabmap/cloud_map LIDAR Velodyne VLP-16 POINT CLOUDS RTAB-Map /zed/rgbd_image /tf /velodyne_points /imu_filter JACKAL /odometry/filtered JACKAL velocity controller /ekf_localization
ZED Stereo Camera rtabmap/cloud_map LOCALIZATION / LOOP CLOSURE DETECTION LIDAR Velodyne VLP-16 RTAB-Map /zed/rgbd_image /tf /velodyne_points /imu_filter JACKAL /odometry/filtered JACKAL velocity controller /ekf_localization
ZED Stereo Camera rtabmap/cloud_map LOCALIZATION / LOOP CLOSURE DETECTION LIDAR Velodyne VLP-16 MAPPING POINT CLOUDS RTAB-Map /zed/rgbd_image /tf /velodyne_points /imu_filter JACKAL ODOMETRY / TF /odometry/filtered JACKAL velocity controller /ekf_localization
LOCATION UPSON HALL, CORNELL UNIVERSITY LTL ARCHITECTURE AND PERKINS+WILL
LOCATION UPSON HALL, CORNELL UNIVERSITY END START LTL ARCHITECTURE AND PERKINS+WILL
END START