Download
1 / 1
10 likes | 115 Views
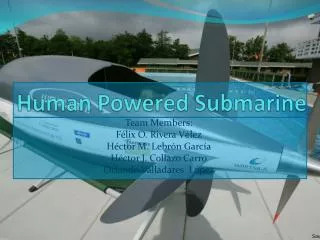
Human-Powered Transportation The NASA Great Moonbuggy Race Powder River Engineering Brittany Fain Andrew Robbins Jared Houfek David Wenig. Abstract

E N D
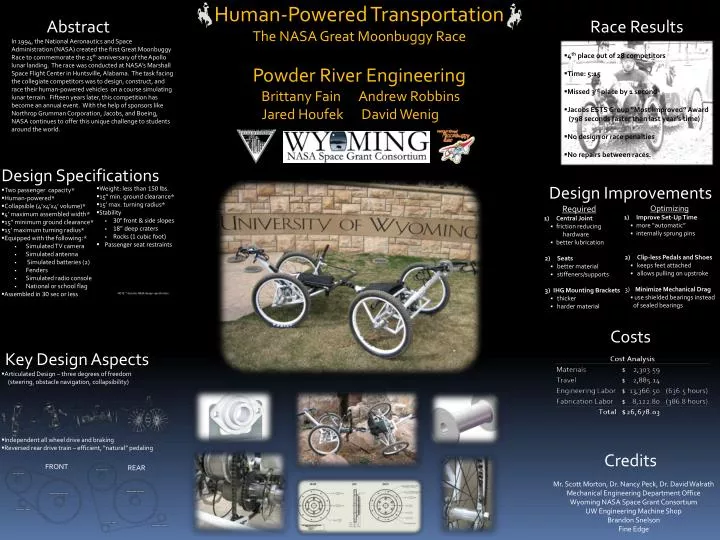
Human-Powered Transportation The NASA Great Moonbuggy Race Powder River Engineering Brittany Fain Andrew Robbins Jared Houfek David Wenig Abstract In 1994, the National Aeronautics and Space Administration (NASA) created the first Great Moonbuggy Race to commemorate the 25th anniversary of the Apollo lunar landing. The race was conducted at NASA’s Marshall Space Flight Center in Huntsville, Alabama. The task facing the collegiate competitors was to design, construct, and race their human-powered vehicles on a course simulating lunar terrain. Fifteen years later, this competition has become an annual event. With the help of sponsors like Northrop Grumman Corporation, Jacobs, and Boeing, NASA continues to offer this unique challenge to students around the world. Race Results • 4th place out of 28 competitors • Time: 5:15 • Missed 3rd place by 1 second • Jacobs ESTS Group “Most Improved” Award • (798 seconds faster than last year’s time) • No design or race penalties • No repairs between races. • Design Specifications • Two passenger capacity* • Human-powered* • Collapsible (4’x4’x4’ volume)* • 4’ maximum assembled width* • 15” minimum ground clearance* • 15’ maximum turning radius* • Equipped with the following:* • Simulated TV camera • Simulated antenna • Simulated batteries (2) • Fenders • Simulated radio console • National or school flag • Assembled in 30 sec or less Design Improvements • Weight: less than 150 lbs. • 15” min. ground clearance* • 15’ max. turning radius* • Stability • 30º front & side slopes • 18” deep craters • Rocks (1 cubic foot) • Passenger seat restraints • NOTE: * denotes NASA design specification • Required • Central Joint • friction reducing • hardware • better lubrication • Seats • better material • stiffeners/supports • IHG Mounting Brackets • thicker • harder material • Optimizing • Improve Set-Up Time • more “automatic” • internally sprung pins • Clip-less Pedals and Shoes • keeps feet attached • allows pulling on upstroke • 3) Minimize Mechanical Drag • use shielded bearings instead • of sealed bearings Costs • Key Design Aspects • Articulated Design – three degrees of freedom • (steering, obstacle navigation, collapsibility) • Independent all wheel drive and braking • Reversed rear drive train – efficient, “natural” pedaling Credits FRONT REAR Mr. Scott Morton, Dr. Nancy Peck, Dr. David Walrath Mechanical Engineering Department Office Wyoming NASA Space Grant Consortium UW Engineering Machine Shop Brandon Snelson Fine Edge