Download
1 / 26
260 likes | 435 Views
Hidden Markov Models. Markov assumption: The current state is conditionally independent of all the other past states given the state in the previous time step The evidence at time t depends only on the state at time t Transition model: P( X t | X 0: t -1 ) = P( X t | X t -1 )

E N D
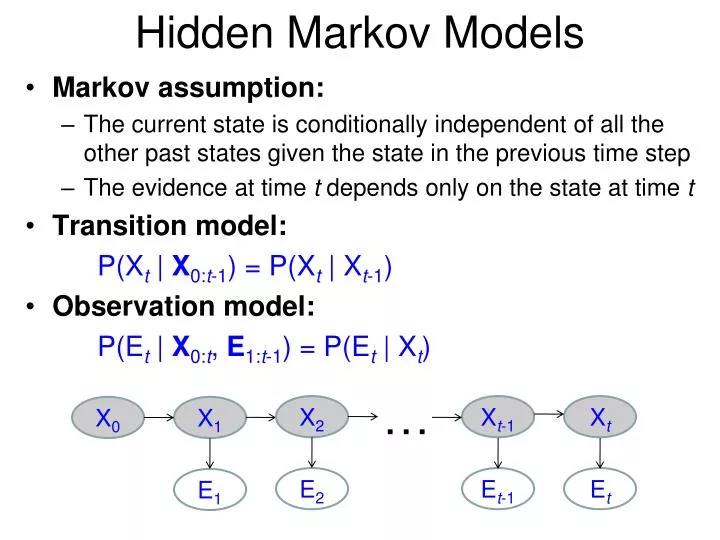
Hidden Markov Models • Markov assumption: • The current state is conditionally independent of all the other past states given the state in the previous time step • The evidence at time t depends only on the state at time t • Transition model: P(Xt | X0:t-1) = P(Xt | Xt-1) • Observation model: P(Et | X0:t, E1:t-1) = P(Et | Xt) … X2 Xt-1 Xt X0 X1 E2 Et-1 Et E1
An example HMM • States:X = {home, office, cafe} • Observations:E = {sms, facebook, email} Slide credit: Andy White
The Joint Distribution • Transition model: P(Xt | Xt-1) • Observation model: P(Et | Xt) • How do we compute the full joint P(X0:t, E1:t)? … X2 Xt-1 Xt X0 X1 E2 Et-1 Et E1
HMM inference tasks • Filtering: what is the distribution over the current state Xt given all the evidence so far, e1:t ? Query variable … … Xk Xt-1 Xt X0 X1 Ek Et-1 Et E1 Evidence variables
HMM inference tasks • Filtering: what is the distribution over the current state Xt given all the evidence so far, e1:t ? • Smoothing: what is the distribution of some state Xk given the entire observation sequence e1:t? … … Xk Xt-1 Xt X0 X1 Ek Et-1 Et E1
HMM inference tasks • Filtering: what is the distribution over the current state Xt given all the evidence so far, e1:t ? • Smoothing: what is the distribution of some state Xk given the entire observation sequence e1:t? • Evaluation: compute the probability of a given observation sequence e1:t … … Xk Xt-1 Xt X0 X1 Ek Et-1 Et E1
HMM inference tasks • Filtering: what is the distribution over the current state Xt given all the evidence so far, e1:t • Smoothing: what is the distribution of some state Xk given the entire observation sequence e1:t? • Evaluation: compute the probability of a given observation sequence e1:t • Decoding: what is the most likely state sequence X0:t given the observation sequence e1:t? … … Xk Xt-1 Xt X0 X1 Ek Et-1 Et E1
Filtering • Task: compute the probability distribution over the current state given all the evidence so far: P(Xt | e1:t) • Recursive formulation: suppose we know P(Xt-1 | e1:t-1) Query variable … … Xk Xt-1 Xt X0 X1 Ek Et-1 Et E1 Evidence variables
Filtering • Task: compute the probability distribution over the current state given all the evidence so far: P(Xt | e1:t) • Recursive formulation: suppose we know P(Xt-1 | e1:t-1) Time: t – 1 Time: t What is P(Xt = Office | e1:t-1) ? et-1 = Facebook 0.6 * 0.6 + 0.2 * 0.3 + 0.8 * 0.1=0.5 Home 0.6 Home ?? 0.6 0.2 Office 0.3 Office ?? 0.8 Cafe 0.1 Cafe ?? P(Xt | Xt-1) P(Xt-1 | e1:t-1)
Filtering • Task: compute the probability distribution over the current state given all the evidence so far: P(Xt | e1:t) • Recursive formulation: suppose we know P(Xt-1 | e1:t-1) Time: t – 1 Time: t What is P(Xt = Office | e1:t-1) ? et-1 = Facebook 0.6 * 0.6 + 0.2 * 0.3 + 0.8 * 0.1=0.5 Home 0.6 Home ?? 0.6 0.2 Office 0.3 Office ?? 0.8 Cafe 0.1 Cafe ?? P(Xt | Xt-1) P(Xt-1 | e1:t-1)
Filtering • Task: compute the probability distribution over the current state given all the evidence so far: P(Xt | e1:t) • Recursive formulation: suppose we know P(Xt-1 | e1:t-1) Time: t – 1 Time: t What is P(Xt = Office | e1:t-1) ? et-1 = Facebook 0.6 * 0.6 + 0.2 * 0.3 + 0.8 * 0.1=0.5 Home 0.6 Home ?? 0.6 0.2 Office 0.3 Office ?? 0.8 Cafe 0.1 Cafe ?? P(Xt | Xt-1) P(Xt-1 | e1:t-1)
Filtering • Task: compute the probability distribution over the current state given all the evidence so far: P(Xt | e1:t) • Recursive formulation: suppose we know P(Xt-1 | e1:t-1) Time: t – 1 Time: t What is P(Xt = Office | e1:t-1) ? et-1 = Facebook et = Email 0.6 * 0.6 + 0.2 * 0.3 + 0.8 * 0.1=0.5 Home 0.6 Home ?? 0.6 0.2 Office 0.3 Office ?? What is P(Xt = Office | e1:t) ? 0.8 Cafe 0.1 Cafe ?? P(Xt | Xt-1) P(et | Xt)= 0.8 P(Xt-1 | e1:t-1)
Filtering • Task: compute the probability distribution over the current state given all the evidence so far: P(Xt | e1:t) • Recursive formulation: suppose we know P(Xt-1 | e1:t-1) Time: t – 1 Time: t What is P(Xt = Office | e1:t-1) ? et-1 = Facebook et = Email 0.6 * 0.6 + 0.2 * 0.3 + 0.8 * 0.1=0.5 Home 0.6 Home ?? 0.6 0.2 Office 0.3 Office ?? What is P(Xt = Office | e1:t) ? 0.8 Cafe 0.1 Cafe ?? P(Xt | Xt-1) P(et | Xt)= 0.8 P(Xt-1 | e1:t-1)
Filtering • Task: compute the probability distribution over the current state given all the evidence so far: P(Xt | e1:t) • Recursive formulation: suppose we know P(Xt-1 | e1:t-1) Time: t – 1 Time: t What is P(Xt = Office | e1:t-1) ? et-1 = Facebook et = Email 0.6 * 0.6 + 0.2 * 0.3 + 0.8 * 0.1=0.5 Home 0.6 Home ?? 0.6 0.2 Office 0.3 Office ?? What is P(Xt = Office | e1:t) ? 0.8 Cafe 0.1 Cafe ?? 0.5*0.8= 0.4 Note: must also compute this value for Home and Cafe, and renormalize to sum to 1 P(Xt | Xt-1) P(et | Xt)= 0.8 P(Xt-1 | e1:t-1)
Filtering: The Forward Algorithm • Task: compute the probability distribution over the current state given all the evidence so far: P(Xt | e1:t) • Recursive formulation: suppose we know P(Xt-1 | e1:t-1) • Base case: priors P(X0) • Prediction: propagate belief from Xt-1 to Xt • Correction: weight by evidence et • Renormalize to have all P(Xt = x | e1:t) sum to 1
Filtering: The Forward Algorithm Time: 0 Time: t Time: t – 1 et-1 et Home prior … Home Home Office prior … Office Office Cafe prior … Cafe Cafe
Evaluation • Compute the probability of the current sequence: P(e1:t) • Recursive formulation: suppose we know P(e1:t-1)
Evaluation • Compute the probability of the current sequence: P(e1:t) • Recursive formulation: suppose we know P(e1:t-1) recursion filtering
Smoothing • What is the distribution of some state Xk given the entire observation sequence e1:t? … … Xk Xt-1 Xt X0 X1 Ek Et-1 Et E1
Smoothing • What is the distribution of some state Xk given the entire observation sequence e1:t? • Solution: the forward-backward algorithm Time: t Time: 0 Time: k et ek Home Home … Home … Office Office … Office … Cafe Cafe … Cafe … Forward message: P(Xk | e1:k) Backward message: P(ek+1:t | Xk)
Decoding: Viterbi Algorithm • Task: given observation sequence e1:t, compute most likely state sequence x0:t … … Xk Xt-1 Xt X0 X1 Ek Et-1 Et E1
Decoding: Viterbi Algorithm • Task: given observation sequence e1:t, compute most likely state sequence x0:t • The most likely path that ends in a particular state xt consists of the most likely path to some state xt-1 followed by the transition to xt Time: 0 Time: t Time: t – 1 xt-1 xt
Decoding: Viterbi Algorithm • Let mt(xt) denote the probability of the most likely path that ends in xt: Time: 0 Time: t Time: t – 1 P(xt| xt-1) xt-1 mt-1(xt-1) xt
Learning • Given: a training sample of observation sequences • Goal: compute model parameters • Transition probabilities P(Xt | Xt-1) • Observation probabilities P(Et | Xt) • What if we had complete data, i.e., e1:t and x0:t ? • Then we could estimate all the parameters by relative frequencies # of times state b follows state a P(Xt = b | Xt-1= a) total # of transitions from state a # of times e is emitted from state a P(E = e | X= a) total # of emissions from state a
Learning • Given: a training sample of observation sequences • Goal: compute model parameters • Transition probabilities P(Xt | Xt-1) • Observation probabilities P(Et | Xt) • What if we had complete data, i.e., e1:t and x0:t ? • Then we could estimate all the parameters by relative frequencies • What if we knew the model parameters? • Then we could use inference to find the posterior distribution of the hidden states given the observations
Learning • Given: a training sample of observation sequences • Goal: compute model parameters • Transition probabilities P(Xt | Xt-1) • Observation probabilities P(Et | Xt) • The EM (expectation-maximization) algorithm: • Starting with a random initialization of parameters: • E-step: find the posterior distribution of the hidden variables given observations and current parameter estimate • M-step: re-estimate parameter values given the expected values of the hidden variables






















