Download
1 / 14
180 likes | 407 Views
PARAMETER DEPENDENT LYAPUNOV FUNCTIONS FOR STABILITY OF LINEAR PARAMETER VARYING SYSTEMS. Nedia Aouani , Salah Salhi , Germain Garcia, Mekki Ksouri. Research Unit of System Analysis and Control ACS, National Engineering School of Tunis University of Toulouse, LAAS-CNRS. OUTLINE.

E N D
PARAMETER DEPENDENT LYAPUNOV FUNCTIONS FOR STABILITY OF LINEAR PARAMETER VARYING SYSTEMS NediaAouani, Salah Salhi, Germain Garcia, MekkiKsouri Research Unit of System Analysis and Control ACS, National Engineering School of Tunis University of Toulouse, LAAS-CNRS
OUTLINE • Motivations • Problem formulation • New representation of the time derivative of the parameter • New LMI based conditions for stability analysis of LPV polytopic systems • Numerical example • Conclusion N. AOUANI ICECS’10 Athens Greece 2
MOTIVATIONS • Over the last two decades, LPV systems has undergone a wealth of practical and theoretical developments [CAO&al, 2004], [Geromel&al, 2006], [Montagner&al, 2009]. All these works treat the problem of stability and establish conditions for analysis purposes. • As to the uncertain parameters, they can be modeled under different structures : affine , polytopic or rational dependence. One difficulty remains how to represent the time derivative of the uncertainty in the case it is assumed to vary in a polytopic domain with bounded rates. • Parameter Dependent Lyapunov Functions (PDLF) are ivestigated the last ten years [Peaucelle&al, 2000], and the LMIs became a powerful skill to deal with such problems. N. AOUANI ICECS’10 Athens Greece 3
MOTIVATIONS • As to ParameterDependentLyapunovFunctions, somespecificforms have been investigated all along the littérature: the class of Polynomial PDLFs[Chesi, 2003, 2004, 2005, 2007], [Oliveira,2005], the class of rational ones [Scorletti, 1995], [Lu, 1996] and the class of affine ones [Feron, 1996], [Gahinet, 1996], [Peaucelle, 2001]. Main Idea: Use of PDLFs of particular forms that have been used for LTI systems by [Ebihara, 2005] , for the case of LPV systems. Reduction of conservatism in the proposed conditions N. AOUANI ICECS’10 Athens Greece 4
PROBLEM FORMULATION Linear Parameter Varying system The system matrices The time varying parameter varies in a vertex such that The parameter’s rate of variation Objectives Assess robust stability of the system ICECS’10 AthensGreece
NEW REPRESENTATION OF THE TIME DERIVATIVE OF THE PARAMETER Lemma1 Previous representations of the parameter’s rate of variation • [Cao & al, 2004] • [Geromel & al, 2006] • [Xie & al, 2005] N. AOUANI ICECS’10 Athens Greece 6
NEW LMI BASED CONDITIONS FOR STABILITY ANALYSIS OF LPV POLYTOPIC SYSTEMS Assumptions: • Stability condition: With: • The time derivative of Lyapunov matrix is given by: Where and N. AOUANI ICECS’10 Athens Greece 7
NEW LMI BASED CONDITIONS FOR STABILITY ANALYSIS OF LPV POLYTOPIC SYSTEMS Proposition The system (1) is asymptotically stable if there exist positive definite symmetric matrices , matrices , and such that the following LMI holds: N. AOUANI ICECS’10 Athens Greece 8
NEW LMI BASED CONDITIONS FOR STABILITY ANALYSIS OF LPV POLYTOPIC SYSTEMS Theorem The system (1) is asymptotically stable if there exist positive definite symmetric matrices , matrices and such that the following LMI holds: And Where are given by N. AOUANI ICECS’10 AthensGreece 9
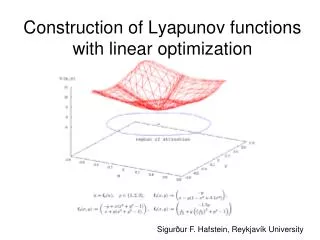
NUMERICAL EXAMPLE We consider the following LPV system [Geromel & al, 2006] Such that the matrices Ai are taken: The uncertain parameter The time derivative of the uncertain parameter is bounded such that ; Purpose: Delimit the region of the plane (,) with and Such that the global asymptotic stability is preserved. ICECS’10 AthensGreece
NUMERICAL EXAMPLE N. AOUANI ICECS’10 AthensGreece 11
NEUMERICAL EXAMPLE If we consider the system (1) with N=3: And We numerically verify the feasibility of the point N. AOUANI ICECS’10 AthensGreece 12
CONCLUSION • We have proposed in this paper a new stability condition formulated in terms of LMI constraints, for an LPV continuous system under polytopic uncertainty structure. • Further analysis conditions can be deduced following the same ideas and increasing redundancy N. AOUANI ICECS’10 AthensGreece 13
THANK YOU FOR YOUR ATTENTION N. AOUANI ICECS’10 Athens Greece 14