Download
1 / 10

E N D
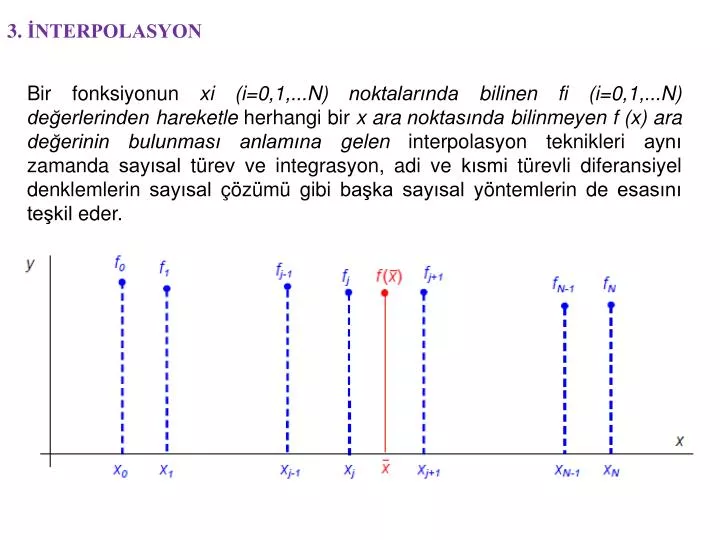
3. İNTERPOLASYON Bir fonksiyonun xi (i=0,1,...N) noktalarında bilinen fi (i=0,1,...N) değerlerinden hareketle herhangi bir x ara noktasında bilinmeyen f (x) ara değerinin bulunması anlamına gelen interpolasyonteknikleri aynı zamanda sayısal türev ve integrasyon, adi ve kısmi türevli diferansiyel denklemlerin sayısal çözümü gibi başka sayısal yöntemlerin de esasını teşkil eder.
İnterpolasyon fonksiyonu olarak çoğu zaman çeşitli mertebeden polinomlar kullanılır. Ancak bazı hallerde logaritmik, eksponansiyel, hiperbolik gibi daha özel fonksiyonlar, periyodik veri değerleri için trigonometrik fonksiyonlar kullanılabilir. Veri noktaları eşit aralıklı olarak dağılmışsa sonlu fark esaslı interpolasyon yöntemleri, eşit aralıklı değilse doğrusal interpolasyon, Lagrangeinterpolasyonuvb yöntemler daha uygun olur.
İNTERPOLASYON POLİNOMLARI Düzlemde N+1 adet noktadan N ‘inci dereceden bir polinom geçirmek mümkündür. Örneğin Noktalarını dikkate alalım. Bu noktaların ilk dördünden şeklinde üçüncü dereceden bir polinom (kübik) geçirmek mümkündür. Her bir noktanın koordinatları bu denklemi sağlayacağı için şeklinde dört denklem elde edilir. Bu lineer denklem takımı çözülürse polinomun katsayıları şu şekilde elde edilir. Yani interpolasyonfonksiyonu şeklindedir. Buna göre örneğin x=3.0 noktasındaki ara değer için y=20.212 elde edilir.
LAGRANGE INTERPOLASYON YÖNTEMİ (LAGRANGE POLİNOMLARI): Lagrangeinterpolasyonpolinomu, Newton interpolasyonpolinomunun yeniden formülleştirilmesidir ve bölünmüş farkların hesaplanmasını gerektirmez. İkinci dereceden bir polinom ile konuyu açıklayalım: Şayet (x0,f0), (x1,f1) ve (x2,f2) gibi üç noktadan şeklinde bir parabol geçirilerek interpolasyon yapılmak istenirse bu defa nokta koordinatları yardımıyla denklem sistemi elde edilir ki bu denklem sisteminin çözümü sonucunda katsayılar olarak bulunur.
Bu durumda parabol denklemi f0, f1 ve f2 için düzenlenerek yine şeklinde daha basit bir biçime sokulabilir. Buradaki Li büyüklükleri şeklinde olup bu büyüklüklere Lagrangepolinomlarıadı verilmektedir. Özet olarak şu şekilde gösterilebilir.
data.txt 0,3 2,60 4,90 10,120 clc,clear x=[0 2 4 10];f=[3 60 90 120];xs=8;dx=0.1; n=length(x);a=polyfit(x,f,n-1),fs=polyval(a,xs) x2=x(1):dx:x(n); for k=1:length(x2); f2(k)=polyval(a,x2(k)); end plot(x,f,'o',x2,f2) Lagrangeinterpolasyonu MATLAB Komutu Lagrangeinterpolasyonu MATLAB Komutu (text dosyasından veri okuyarak) clc;clearx=[0 2 4 10];f=[3 60 90 120];interp1(x,f,8,'spline') clc;clear v=load ('c:\saha\data.txt') interp1(v(:,1),v(:,2),8,'spline')
Serbest düşen bir paraşütçünün hızını ölçen bir alet geliştirilmektedir. Özel bir test için elde edilen ölçme sonuçları aşağıdaki görülmektedir. Ölçüm yapılan t=7 s ve t=13 s zaman dilimi arasındaki büyük açıklığı doldurak için paraşütçünün t=10 s’deki hızını tahmin ediniz. İnterpolasyonpolinomlarının karakterleri tahmin edilemeyeceği için Lagrange algoritması dördüncü, üçüncü, ikinci, birinci dereceden interpolasyonpolinomlarını oluşturmak için kullanılarak sonuçları karşılaştıralım
4. Dereceden polinom y=5430 cm/s 3. Dereceden polinom y=4874 cm/s 2. Dereceden polinom y=4638 cm/s 2. Dereceden polinom y=4347 cm/s
Burada incelenen problem için 1. ve 2. dereceden polinomlarındaha uygun olduğu görülmektedir. Yapılan hesaplamalarda incelenen sistemin fiziki davranışı mutlaka dikkate alınmalıdır. Not: Neville yöntemi Lagrange yönteminin kapalı bir uygulaması olup Lagrange yönteminin zaaflarını giderebilmektedir. clc,clear x=[1 3 5 7 13];f=[800 2310 3090 3940 4755]; %x=[3 5 7 13];f=[2310 3090 3940 4755]; %x=[1 7 13];f=[800 3940 4755]; %x=[7 13];f=[3940 4755]; xs=10;dx=0.1; n=length(x);a=polyfit(x,f,n-1),fs=polyval(a,xs) %x2=x(1):dx:x(n); x2=0:dx:x(n); for k=1:length(x2); f2(k)=polyval(a,x2(k)); end plot(x,f,'o',x2,f2) hold on Bu ders notunda M.A. Yükselen’in, Uygulamalı Sayısal Yöntemler Ders Notlarından faydalanılmıştır.