Download
1 / 20
200 likes | 325 Views
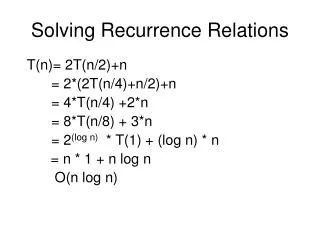
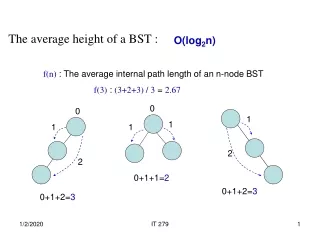
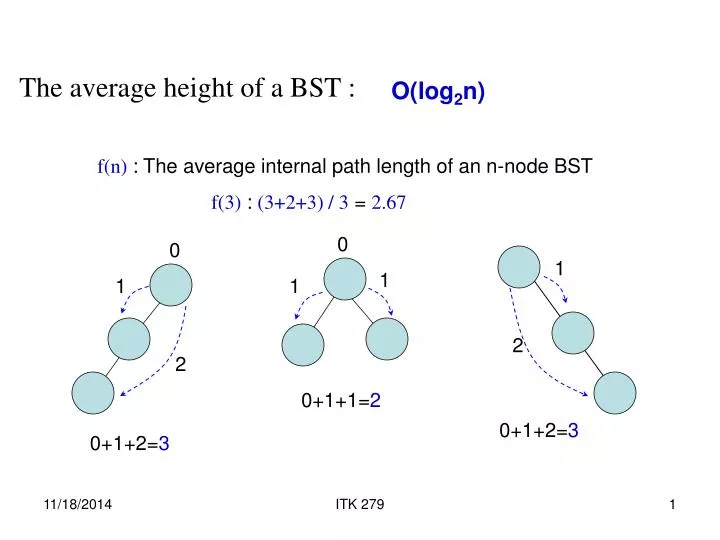
The average height of a BST :. O(log 2 n). f(n) : The average internal path length of an n-node BST. f(3) : (3+2+3) / 3 = 2.67. 0. 0. 1. 1. 1. 1. 2. 2. 0+1+1= 2. 0+1+2= 3. 0+1+2= 3.

E N D
The average height of a BST : O(log2n) f(n) : The average internal path length of an n-node BST f(3) : (3+2+3) / 3 = 2.67 0 0 1 1 1 1 2 2 0+1+1=2 0+1+2=3 0+1+2=3 ITK 279
Adel’son-Vels’kii and Landis, Soviet Mathematic Doklady, 3:1259-1263, 1962 C. Crane, D. Knuth, et al in 1970’s AVL Tree A BST in which the height difference between the two children of any node is always less than 2. +1 +1 -1 j k j+1 k+1 h h+1 ITK 279
AVL Tree -- an example of Dynamic Tree We dynamicallymaintain the properties of AVL-tree when we insert (remove) a node by four different operations (rotations) Dynamic Tree Static Tree Huffman Code -- an example of Static Tree We staticallyanalyze the code and build up an optimal tree for retrieving the code words. ITK 279
performed at the bad node where the difference between the heights of its two children is bigger than 1. Four operations : (rotations) If a node is bad caused by: then perform • Right-child’s Right-child • Left-child’s Left-child • Right-child’s Left-child • Left-Child’s Right-child • RR rotation • LL rotation • RL rotation • LR rotation ITK 279
No Rotation is Needed +1 0 -1 0 ITK 279
RR Rotations: +2 +1 ITK 279
RR Rotation: +2 R +0 R +0 +1 ITK 279
LL Rotation: L -2 +0 L -1 +0 ITK 279
Rotations: RL +1 +2 0 h+1 +1 -1 0 0 h+1 +0 -1 h h ITK 279
Rotations: RL RL Rotation: R 0 +2 L h+1 -1 0 +1 h+1 -1 h h h+1 h+1 h h ITK 279
Rotations: LR LR Rotation: L -2 0 1 R h+1 0 +1 h+1 -1 -1 h h h+1 h+1 h h ITK 279
Rotate this sub-tree first +2 R Could be RR or RL, depending on what happens in the blue sub-tree. R +2 Afterwards, examine the red node again to see is another rotation is needed. ITK 279
Rotations: LL +2 +1 +1 h+1 -1 -2 -1 h -2 -1 0 h-1 h -1 0 h-1 h-1 ITK 279
Example: 10 20 30 10 RR Rotation: 20 20 10 30 30 ITK 279
Example: 40 50 20 RR Rotation: 20 10 30 10 40 40 50 30 50 ITK 279
Example: 35 20 R 30 RL Rotation: 10 40 40 L 20 30 50 10 50 35 35 ITK 279
Possible complications Re-assign the links +2 h+1 -1 h+1 -1 h h Tracking the heights and balance-factors ITK 279
RR rotation in C++ a=t +2 R b template<typename T> // RR rotation on t; TreeNode<T> * AVLTree<T>::RR(TreeNode<T> * t) { TreeNode<T> * a = t, * b = t->right; a->right = b->left; b->left = a; a->height -= 2; return b; } h R +1 h h height is an extra member variable in the TreeNode. ITK 279
RL rotation in C++ a=t template<typename T> // RL rotation on t; TreeNode<T> * AVLTree<T>::RL(TreeNode<T> * t) { TreeNode<T> *a, *b, *c; a = t; b = t->right; c = t->right->left; a->right = c->left; b->left = c->right; c->left = a; c->right = b; c->height++; b->height--; a->height-=2; return c; } b R +2 L c h+1 -1 h+1 -1 h h ITK 279
AVL h: Average Heights n Random Keys ITK 279